uCOS-II優先級任務調度在PowerPC上的移植和優化

1 基于優先級的任務調度
一個基于優先級的實時多任務內核的任務調度機制需要實現下面三個核心的處理功能:
◆ 將任務置于就緒態;
◆ 將任務取消就緒態;
◆ 找出最高優先級的就緒態任務。
在32位機上運行64個任務,可使用兩個32位的整型變量數組OSRdyTbl [2],建立一個64位的任務就緒態向量;每一位表示對應優先級的任務是否處于就緒態,例如OSRdyTbl [0]的第4位為1表示優先級為4的任務處于就緒態。構造如下的三個函數,用來完成設置任務就緒、取消任務就緒和尋找當前最高優先級的就緒任務。
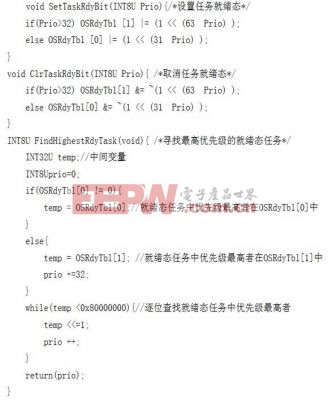
上述代碼可在任何處理器上實現所需的功能,沒有考慮任何的優化和改進。通過這樣的原理性函數,可以更好地理解多任務內核的任務調度。
尋找最高優先級就緒態任務的函數調用頻率高,其執行時間直接影響內核的任務切換延遲時間,影響系統實時性。上述尋找最高優先級的就緒態任務的代碼,隨當前就緒任務的優先級不同,其循環次數也不同,導致其運行時間不確定。
2 μC/OS的任務調度實現方法
μC/OS和μC/OSII是為8位CPU寫的,采用8位機算法,支持64個任務。使用8個字節的OSRdyTbl全局數組,表示所有任務的就緒態信息:1為任務就緒,0為非就緒。數組第一個字節的b0位代表64個任務中優先級最高的任務,最后一個字節的b7位代表優先級最低的空閑任務,永遠為1。當OSRdyTbl 數組的數據不為0時(表示對應的8個任務中至少有1個進入就緒態),另一個單字節全局變量OSRdyGrp 中的相應位要置1。當任務狀態發生變化時,需更新OSRdyGrp和OSRdyTbl中對應的位。
尋找最高優先級的就緒任務時,μC/OS使用了預先固化的256字節的對照表OSUnMapTbl,給出特定字節值的最低位1所在位的信息。查表算法避免了逐位檢測各優先級位引起的執行時間的不確定性,程序簡單,執行速度快,與就緒任務多少和優先級無關。
對于取值0~63的任務優先級,μC/OS將其劃分成高3位的Y和低3位的X,并保存在其任務控制塊TCB的OSTCBX和OSTCBY中,其對應的OSUnMapTbl的值保存在OSTCBBitY和OSTCBBitX變量中,以提高運算速度。為了避免函數調用所帶來的額外開銷,μC/OS直接用語句實現如下的三部分功能。
① 設置任務進入就緒態
OSRdyGrp |= ptcb>OSTCBBitY;
OSRdyTbl[ptcb﹥OSTCBY] |= ptcb>OSTCBBitX;
② 設置任務退出就緒態。
y = OSTCBCur>OSTCBY;
OSRdyTbl[y] = ~OSTCBCur>OSTCBBitX;
if (OSRdyTbl[y] == 0) {
OSRdyGrp = ~OSTCBCur>OSTCBBitY;
}
③ 尋找最高優先級的就緒態任務。以OSRdyGrp的值做偏移量,查OSUnMapTbl表,得到1個0到7的數Y,作為優先級高3位,再根據Y的值,找出OSRdyTbl中對應的字節,并且再次查OSUnMapTbl表,得到1個0到7的數X,作為優先級低3位的值,通過將Y左移3位再加上X的值,得到就緒任務中優先級最高的那個。
y = OSUnMapTbl[OSRdyGrp];
OSPrioHighRdy = (INT8U)((y 3) + OSUnMapTbl[OSRdyTbl[y]]);
μC/OS的任務調度算法采用了以空間換時間的策略,將特定字節值的最低位1所在位的信息預先計算并保存到表中,運行時通過查表快速得到;每個任務的TCB中除了保存優先級信息本身外,還使用額外的4個字節保存優先級的高低3位和對應的OSUnMapTbl值,以避免運行時實時計算這幾個值所帶來的延遲。這些措施增加了系統ROM和RAM的開銷。










評論