基于MCU控制的自動平衡吊具

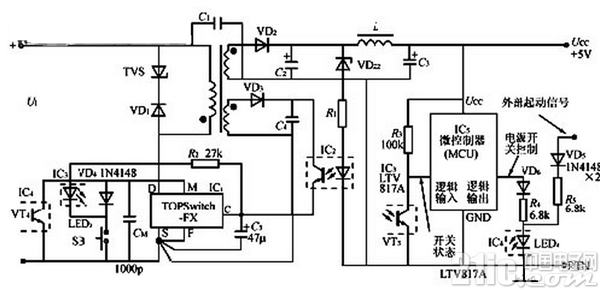
執行部分:接收單片機的輸出信號,并按照上位機自動、手動調平指令調節1、2號變頻器輸出,從而驅動x、y向電機轉動方向,促使主吊點偏移完成調平工作。無線組件將上位機和下位機無縫連接,使得上位機的控制和數據獲取更加實時。
3 吊具結構及承重系統設計
3.1 吊環
考慮吊具自身重量,并考慮起吊過程的沖擊加速度,根據GB825—88,選擇螺釘GB 825 M36,垂直懸吊2.3t。
3.2 框架
為了足夠的安全裕度,涵蓋考慮最不利情形:一端固支的水平矩形等截面懸臂梁,自由端受重力10 000/2=5000 N;自重加其它零件重量4 000 N偏于安全地視為作用于懸臂梁懸出端。矩形高為100 mm,寬為68 mm;
因此,各種低碳鋼均滿足要求。
3.3 電機
選用YVP100L2—4變頻電機,最高轉速5 000 rpm,多級可調。額定功率3 kW,額定扭矩19 Nm。不使用減速機,螺距為3mm,當電機轉速為960 rpm時,每秒鐘吊環移動48 mm。這個速度可以看做吊具工作時的最高速度。
電機功率=吊具上升速度×(重力加速度+上升加速度)×(被吊質量+設備質量)/機械效率=0.05×(9.8+0.1)×(1 000+400)/0.22=3 kW上述式子是關于吊具徹底歪斜這種最不利情況的,裕度過大。電機功率選國標系列值3 kW。
3.4 螺紋傳動機構
螺牙強度能承受(1 000+400)×9.8N的軸向力(吊具徹底歪斜,這是最不利的情況)選用梯形螺紋。因為矩形螺紋運動精度高,成本高。
根據耐磨性初選中徑,梯形螺紋:
其中,[p]=18MPa,ψ=H/d=2.5,Q=14 000 N,
得到d2=11.5 mm。為了更好的剛度,選d=32 mm,螺距t=3 mm。
螺母螺紋牙強度應滿足:
滿足要求。另外,由于施加軸向力的結構不允許徑向位移,所以實際的穩定性安全系數還會高很多;其次,使用中也沒有整個吊具傾斜90度的情況。
4 小結
本文對吊具的機械結構的設計進行了介紹,并說明了系統工作原理。對吊具結構及承重設計、動力系統設計給出了詳細計算過程。本設計已經獲得了國家專利的授權。

評論