基于AVR單片機atmega32的PID和PWM液體流量控制系統研究

液體流量控制通常采用電磁閥實現,近年來,電磁閥的結構和控制方式發生了很大的變
化,隨著計算機進入控制領域,以及新型的電力電子功率元器件的不斷出現,使采用全控制的開關功率元件進行脈寬調制(pulse width modulation ,簡稱PWM)控制方式得到了廣泛的應用。這種控制方式很容易在單片機中實現,從而為電磁閥的控制數字化提供了契機。
將偏差的比例(proportion)、積分(integral)、微分(differential)通過線性組合構成控制量,用這一控制量對被控對象進行控制,這樣的控制器稱PID控制器。PID控制器最早出現在模擬控制系統中,傳統的模擬PID控制器是通過硬件(電子元件、氣動和液壓元件)來實現它的功能。隨著計算機的出現,把它移植到計算機控制系統中來,將原來的硬件實現的功能用軟件來代替,因此稱作數字PID控制器,所形成的一整套算法則稱作數字PID算法。數字PID控制器與模擬PID控制器相比,具有非常強的靈活性,可以根據試驗和經驗在線調整參數,因此可以得到更好的控制性能。
2. 液體流量控制系統組成
本系統采用AVR系列的atmega32單片機為核心,通過設置atmega32的PWM控制寄存器產生脈寬可調的PWM波,對比例電磁閥的輸入電壓進行調制,從而實現了對液體流量的變量控制。單片機統過渦輪流量計采集實際流量信號,根據該信號在其內部采用數字PID算法對PWM控制寄存器的值進行修改,從而達到精確的變量控制。為了防止外界干擾信號進入控制系統,單片機和渦輪之間采用光藕隔離,提高了系統的可靠性。溫度傳感器和壓力傳感器用來做監測噴桿中的壓力和溫度。通過4*4鍵盤和128*64液晶模塊實現人機對話,便于用戶操作。系統原理圖如圖2-1所示:

圖2-1
3硬件部分
3.1 PWM驅動電路
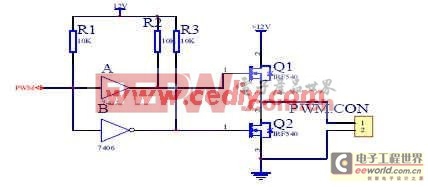
單片機輸出的PWM脈沖信號分別經7406和7407輸入到Q1,Q2的G極,在每個PWM周期的高電平區間,Q1導通,Q2截止,電磁閥導通。在每個PWM周期的低電平區間,Q1截止從而切斷了電源,電磁閥的感應電動勢經Q2內部續流二極管形成回路。此時Q2的G極為高電平但是由于二極管的鉗位作用使開關二極管關閉,因此通過調整單片機的PWM波就可以實現電磁閥輸入電壓占空比的調節,從而實現對流量的調節。
3.2 比例電磁閥
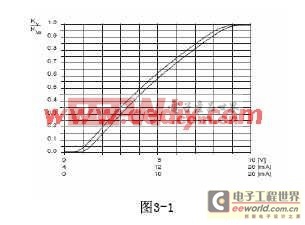
比例電磁閥在上世紀60年代末就已經得到了應用,最初是用于液壓控制系統。隨著單片機和集成電路的發展,其逐漸應用到各種液體的流量控制中。比例型電磁鐵的工作原理如下:線圈通電后,軛鐵和銜鐵內部產生磁通并產生電磁吸力,將銜鐵吸向軛鐵,同時銜鐵上的彈簧受到壓縮,當銜鐵上的電磁力和彈簧力平衡時,銜鐵停止位移。比例型電磁鐵的吸力在有效行程范圍內和線圈的電流或電壓大小具有線形關系。因此通過調解輸入的電流或者電壓就可以控制其開口的大小,從而達到變量控制的目的。本系統采用的比例電磁閥特性曲線如圖3-1所示:(Kvs代表比例電磁閥最大開口時的流量,Kv代表對應某一電壓或者電流值時的流量值)。
4. 軟件部分
4.1 PWM波的產生
設計采用單片機atmega32產生PWM信號。atmega32的定時/計數器的PWM模式可以分成快速PWM和頻率(相位)調整PWM兩大類。 本設計采用快速PWM模式,快速PWM可以的到比較高頻率的PWM輸出,響應比較快,因此具有很高的 實時性。此時計數器僅工作在單程正向計數方式,計數器的上限值決定PWM的頻率,而比較匹配寄存器的值決定了占空比的大小。快速PWM模式的控制寄存器設置如下:
//輸出端口初始化
PORTD=0x44;
DDRD=0x20;
//T/C1初始化
TCCR1A=0xC3;/*比較匹配時OC1A輸出高電平,在top值時清零ICP下降沿捕捉,
時鐘1/8分頻(暫定),即工作在反相pwm模式*/
TCCR1B=0x0A;//10位快速pwm模式
TCNT1H=0x00;//start at 0
TCNT1L=0x00;

pwm相關文章:pwm原理









評論