基于LabVIEW的橋梁運行狀態長期

論述鐵路橋梁運行狀態長期監測系統的設計方法,
介紹它的硬件組成、軟件結構以及系統功能,本系統利用網絡傳感器、以太網技術和虛擬儀
器技術,在LabVIEW平臺上實現了現場數據的網絡化遠程傳輸、監控和數據查詢。
關鍵詞:網絡傳感器;遠程監控;LabVIEW;虛擬儀器?
Design of Long?term Bridge Monitoring System Based on LabVIEW
YANG Yan1, MA Zengqiang1, SHI Yancong2
(1.Department of Computer, Shijiazhuang Railway Institute,
Shijiazhua
ng 050043, China;
2.Department of Electrical Engineering, Shijiazhuang Railway Institute,
Shijiazh
uang 050043, China)
Abstract: The paper demonstrates the design method of long?term
bridge monitoring system. Not only the structure of its hardware and software b
ut also its functions are presented. With the application of technology of netwo
rked sensor、 Ethernet and virtual instrument, the networked transmission, monit
oring and querying of data information are realized by the developing platform o
f LabVIEW.
Keywords: networked sensor; remote monitoring; LabVIEW; VI
1硬件系統組成
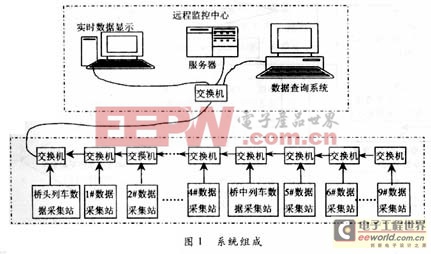
監測系統框圖如圖1所示,該系統的監測內容主要包括:上行線列車運行特征,上、
下行線過車時上、下行線各孔跨中的橫向振動;上行線重點監測孔跨中的豎向、橫向振動,
豎向撓度、相關橋墩的橫向振動、環境溫度、鋼軌溫度、雨水情況等。各被測量經過相應的
傳感器就近接入各個數據采集站,各采集站的數據經本地交換機送入局域網傳送至遠程監控
中心。
在本系統中,以Rabbit 3000微處理器為核心的各數據采集站是傳感器技術與網絡通信
技術相結合的結果,我們稱之為網絡化傳感器,其結構圖如圖2所示。

網絡傳感器的關鍵部分采用美國Z?World公司的核心模塊RCM3200,該模塊使用新一代嵌
入式系統CPU——Rabbit 3000,它是8位高性能微處理器,其程序存儲器中固化有當前流行
的Internet協議棧,如HTTP、SMTP、POP3、TCP、UDP、ICMP、IP等,而且集成有10/100Base
T以太網接口,這樣網絡傳感器在進行數據采集或完成I/O控制任務的同時,可以完成Inte
rnet協議處理,實現與上位機之間信息的實時發布與共享。每個網絡傳感器有
自己的IP地址和端口號,在整個監測系統中,可以安裝多個網絡傳感器,用交換機相連,組
成以太網。
網絡傳感器實現了橋梁健康狀態監測系統的完全數字化和網絡化,使得測控網與信息網融為
一體,而且還可以做到“即插即用”,非常方便于系統的擴充和維護。?
在遠程監控中心,有一個服務器,兩臺微機,其中一臺用于遠程現場數據的實時顯示,另一
臺用于數據查詢。在這里可以實時顯示列車通過橋頭和橋中時的時間、車速、軸數、軸距(
根據這
些參數再結合橋梁跨中撓度及軸重監測的結果,可大致推斷出列車的編組情況、
車輛
類型、載貨情況(是否空車或空、重混編))、實時顯示各采集量(如各孔橋梁豎向、橫向振動
位移,主梁跨中橫向、豎向加速度、撓度,相關橋墩的橫向振動位移,重點實驗主梁下緣應
力等)的時程曲線、最大值、超限報警等,列車通過后,所有數據入數據庫保存。通過數據
查詢系統可對庫存數據進行分析、對比、處理等工作,用戶還可查詢每次列車過橋時各種被
測量的歷史數據、曲線及其特征值。
2系統功能實現
在LabVIEW平臺上建立遠程監控系統,LabVIEW運用內嵌的TCP/IP網絡通訊協議組通訊,通過
TCP/IP結點使用服務器/客戶機模式實現局域網通信。
下面主要介紹遠程監控中心數據實時采集控制、顯示、分析功能的實現方法:首先,系統啟
動橋頭測速的TCP連接,監測是否有列車到達信號,如果有車到達則繼續接收測速站的數據
,直到列車軸數大于等于4之后(目的是剔除虛警,因車頭軸數≥4),啟動第一組的TCP連接(
若連接次數大于指定次數后,仍不能正確連接,則認為本組網絡連接故障,退出本組數采,
啟動第二組TCP連接),測速監測循環繼續接收測速站發來的數據,直至列車通過橋頭后,斷
開與測速站的TCP連接。每組數采循環采用兩個TCP Read節點,第一個節點讀出數據包長,
第二個節點根據包長將數據全部讀出,然后將數據按通道拆分后,將每通道上傳的傳感器測
得的電壓數據轉換為相應的物理單位后送實時數據顯示、極值統計并顯示、檢查是否超限,若超限則聲光報警等。并對本組指定通道的振幅數據實時監測是否大于啟動下組的啟動
閾值,若是則啟動下組的TCP連接,開始下組的數采。這種前后組的振幅啟動控制對貨車比
較適合,因為貨車的振動幅值較大;但由于車頭和客車的振動幅值較小,采用振幅啟動方法
只能降低振幅啟動閾值,這樣勢必引起下組數據數采的提前TCP連接和采集,導致入庫數
據量增加,所以針對這種情況,增加了另一種數采控制方法,即速度啟動:根據橋頭測速站
測到的列車速度和每組距橋頭的距離推算列車到達每組的時間,當啟動下組時間到或本組振
幅大于啟動下組的啟動閾值時都可啟動下一組的TCP連接,繼而開始下一組的數采。
由于大橋長達3公里以上,所以列車在橋上行駛時存在加速和減速情況,僅用列車經過橋頭
時的速度推算列車到各測站的時間是不夠準確的,故在橋中增加了一個測速站,列車到達橋
中時啟動第五組的TCP連接和數采,由橋中列車速度和各測站與橋中的距離推算列車到達后
面幾組測站(6-9組)的時間和每組指定通道的振幅來啟動下面一組的TCP連接和數采工作。
采集結束控制:在每組的數據采集過程中,監視指定通道(即指定孔)的振幅,若振幅小于本
組的關閉閾值則延時若干時間后,關閉本組的數據采集;為加強采集控制的可靠性(由于傳
感器失靈可能導致列車通過該測點后振動幅度仍可能不減小、上下行會車等原因造成的振幅
不減小情況,如果僅靠振幅控制結束采集勢必造成采集時間過長,無用數據過多,增加數據存
儲的壓力),針對測速站測得的每趟車的軸數不同(貨車100根軸以上,一般情況下車頭和客
車的軸數少于100),每組采集時間分為兩擋:貨車3分鐘,車頭和客車1.5分鐘,從啟
動本組數采開始計時,采集時間到也可關閉本組數據采集,斷開本組TCP連接。和每組的
啟動條件類似,振幅關閉和時間關閉采用或邏輯,哪個條件先到達則那個條件起關閉本組數
采的作用。
正常情況下,隨著列車依次到達各測站,各站的TCP連接和采集工作依次啟動,并隨著列車
的通過而依次關閉數采和TCP連接,系統重新開始下一趟列車的監測過程。
由于本遠程監測系統分布范圍較大,監測點多,所用網絡組件較多,任何部分出現故障都可
能造成數采流程的不能正常結束,為此,在系統中增加了系統總清控制,即在橋頭測速站測
到列車到達后,啟動系統總定時,當定時時間到達10分鐘后,監控程序發出總清命令,結束
各測站的數據采集,斷開所有測站的TCP連接,系統重新進入初始監測狀態(一般來講,列車
過橋
時間不會超過10分鐘)。系統基本工作流程圖見圖3。
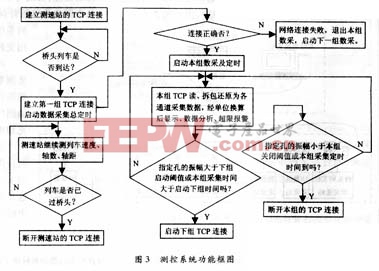
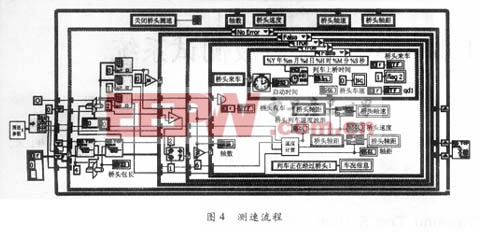
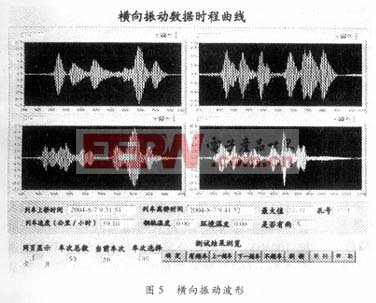
圖4為測速流程的框圖程序,圖5是從數據查詢系統調出的某次列車經過時,部分橋梁橫向振
動波形。
由于在網絡傳感器中的Rabbit 3000使用了看門狗技術,遠程測控軟件也采用了軟件濾波等
多項抗干擾技術及自復位措施,使得系統運行具有很強的健壯性和可靠性。?
3結束語
本系統現已經在黃河大橋上運行將近半年,該系統的成功運行為橋工處的橋梁狀態
實時遠程監測、橋梁維護、故障預警、橋梁運行數據查詢等管理工作提供了科學依據,
庫存數據為橋梁學家研究橋梁振動理論提供了豐富的數據。本系統可應用于各種大型鐵路橋
梁、公路橋梁、水庫大壩等的運行狀態和健康狀態的遠程監測。

tcp/ip相關文章:tcp/ip是什么
電能表相關文章:電能表原理










評論