陀螺儀測量用數字式功率計的設計

摘 要:本文介紹了一種用于陀螺馬達的數字式功率計的設計。該功率計通過PCL818數據采集卡對信號進行采樣,可動態顯示測得的功率、電壓和電流,重點敘述了設計原理和系統的組成,并進行了誤差分析。實驗結果表明這種方法能夠分辨出10mW的功率變化,而且精度比較高,可推廣至一般的微電機的功率測量。
關鍵詞:陀螺儀 功率 采樣
1 引言
慣性導航系統具有完全自主性、全天候和抗外界干擾等特點,可以提供完整的導航定位參數,己廣泛地應用于各種運載體的導航定位中。作為核心元件的陀螺儀,它為系統提供坐標基準,用于測量載體的姿態和方位信息。因此其性能將直接影響慣性導航系統能否正常、可靠地工作,所以研究陀螺儀的可靠性尤其是陀螺儀的壽命是十分重要的。由于陀螺儀具有小批量、高成本的特點,人們力圖通過少量陀螺儀完整壽命試驗期間有關參數的監控、陀螺儀運行狀態分析等,建立陀螺儀壽命預測模型和可靠性評估方法,以期研究出基于部分壽命周期(如10%)試驗數據的陀螺儀可靠性評估方法。為此,結合有關課題,以動力調諧陀螺儀為例,研制陀螺儀壽命試驗測試系統。本文介紹該測試系統中陀螺儀測量用的數字式功率計的設計和精度分析。
由于陀螺馬達的功率變化量比較小,要對其功率變化進行分析,必須能分辨出10mW的功率變化[1]。根據公式P=UI可知測量功率需要計算電壓和電流的乘積,目前常用的方法有模擬乘法器、時分割乘法器和采樣后由計算機處理即數字式方法等。其中模擬乘法器由于其線性度和溫漂等問題精度不高,一般只用于普通的功率表。時分割法將脈沖寬度與脈沖幅度調制相結合,測量精度高,但是電路復雜,研制時間長,而且誤差隨信號源頻率的增加而增大[2]。數字式方法采用數據采集卡將電壓電流轉換為數字量,然后輸入計算機進行計算,具有精度高、開發周期短、后續處理方便等特點。本文介紹的數字式功率計就是采用這種方法,通過PCL818數字采集卡采集動調陀螺電機的電壓、電流來計算功率,所設計的功率計可動態顯示測得的功率、電壓和電流。實驗結果表明這種方法能夠分辨出10mW的功率變化,而且精度比較高,誤差不超過全量程的0.2%,并且這種方法可被應用推廣到測量其他微電機的功率、電壓和電流。
2 測量原理
設信號的電壓和電流分別為v(t)和i(t),則在測量時間T期間內的平均功率為:![]()
若對電壓和電流信號同時進行采樣并轉換為數字量,便可計算其瞬時功率,通過計算多點瞬時功率的平均值即可求得平均功率。設tk時刻的電壓和電流分別為v(tk)和i(tk),則信號的平均功率可以表示為:![]()
其中n是時間T內的采樣數。如果采樣時不能保證同時性,則由式(2)所得的功率值不等于式(1),其差值是由所謂的截斷誤差造成的。取盡可能多的采樣點數作平均可以減小截斷誤差。若陀螺馬達的激勵為正弦信號且其電壓為V電流為I,如果采樣頻率是該信號頻率的4倍以上,則最大的截斷誤差EMAX為[3][4]:![]()
其中c是T時間內輸入信號的周期數,γ可由輸入信號的頻率f得到:γ=2πf/fs,fs為采樣頻率。如果能保證T-cf<fs,則最大的截斷誤差可由下式給出:![]()
可見此時的截斷誤差與輸入信號的周期數無關而與T時間內的采樣點數n成反比,因此可采用加大采樣點數的方法來減小截斷誤差。
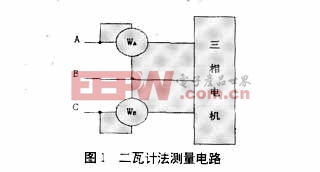
陀螺馬達相當于一個三相電機,要測量其功率一般采用二瓦計法,即需要用兩個功率表測量馬達AB相電壓和A相電流及CB相電壓和C相電流的功率,然后相加即是馬達的功率。如圖1所示三相電機的總功率為兩個功率表WA、WB的示值PA和PB之和。
3 系統組成
本文所設計數字式功率計的系統組成如圖2所示。電壓、電流必須經過轉換以滿足模數轉換器ADC的輸入范圍。模數轉換由PCL818數據采集卡來完成,該卡具有16通道(單邊輸入)/8通道(雙邊輸入)12位的A/D,通過跳線可以設置為不同的輸入模式,這里采用8通道模式。其中2個通道采集電壓,2個通道采集電流。由于PCL818采用分時采樣,所以其前面加了采樣保持電路,以保證其采樣的同時性。采樣保持電路的控制信號由主機紿出。
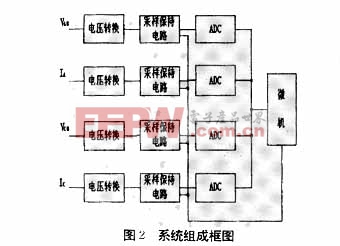
實際電路中待測電壓、電流并不符合PCL818的信號輸入要求,因此需要采樣電路首先將電壓電流轉換到PCL818的輸入范圍內。PCL818的輸入范圍可根據需要選擇±5V和±10V,這里選為±5V。電壓信號和電流信號分別用電壓互感器和電流互感器轉換到相應的范圍。
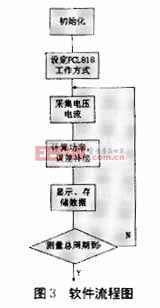
整個系統的軟件由C語言編寫,主要功能包括:?
(1)PCL818L數據采集卡的初始化。將其設置為軟觸發模式,采樣頻率為20k。?
(2)數據的讀取和功率計算。由式(2)來計算其平均功率,并進行誤差補償。采樣點數取10000點。?
(3)數據的顯示和保存。按要求顯示功率或者電壓、電流,并將電壓、電流和功率保存起來以供后續分析。軟件程序框圖如圖3所示。
4 誤差分析
測量功率的誤差除了前面分析過的截斷誤差,還包括采樣量化過程中造成的誤差以及硬件設備的缺陷造成的誤差等。A/D轉換前的信號調理需要仔細選擇元件,電流互感器和電壓互感器的線性誤差要盡量的小。對于模數轉換造成的誤差,可以這樣來估計,由于正弦信號其電壓的峰峰值為22Vrms,若考慮到畸變波,其最高值可取2×22Vrms,12位的A/D共有4096級,考慮到量化誤差,則A/D轉換器的精度約為0.14%RMS,綜合信號調理部分,誤差應該控制在0.2%以下。實驗結果如表1所示,可見誤差基本可以控制在0.2%以下。
5 結論
根據上述方案設計的數字式功率計,通過實驗和工程應用表明,測量精度比較高,誤差不超過量程的0.2%。可以滿足項目需要。該方法還可適用于其他一般微電機的功率和電流、電壓的測量。如果采用16位A/D轉換器,還可以進一提高測量精度。

參考文獻:
[1]陳柏森,張玉龍.毫瓦計—功率變化量測量儀[J].中國慣性技術學報,1997,5(3)
[2]海鷹,袁鑄鋼,孟慶金.電流型時分割乘法器的原理性誤差分析[J].山東建材學院學報,1996年6月
[3]Gerard N. Stenbakken.High-accuracy. sampling wattmeter[J]. IEEE Transactions on lnstrumentation and Measurement, VOL. 41,No.6December l992
[4]Gerard N.Stenbakken.A wideband sampling wattmeter[J].IEEE Transactions on Power. Apparatus and System,VOL,PAS-103,No.10. October l984

接地電阻相關文章:接地電阻測試方法








評論