五相混合式步進電動機走步均勻性分析

五相混合式步進電動機走步均勻性分析
文章對五相混合式步進電動機采用下橋臂電流恒定不變式恒流斬波驅動時的步進均勻性進行了詳細分析,針對存在的不足,提出了下橋臂電流恒定值可變式恒流斬流驅動方案。?
關鍵詞:混合式步進電動機;斬波;驅動電路
Step Uniformity Analysis for 5phase Hybrid Step Motor
WANG Youjun
(Institute of Sciences, PLAUST, Nanjing 210016, China)
Key words: hybrid step motor; chopping; driving circuit
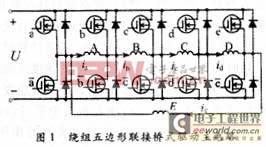
開環工作方式下,步進電動機走步的均勻性與驅動電路形式密切相關。五相混合式步進電動機主電路驅動控制方式有升頻升壓驅動和定壓恒流斬波等驅動方式,定子繞組聯接有五相星接、五邊形聯接和五相全H橋聯接三種方式。定壓恒流斬波驅動適合于對高速力矩和抗沖擊性有高要求的場合。實踐中發現:驅動主電路采用下橋臂電流恒定值不變式定壓恒流斬波,定子繞組五邊形聯接時,電機在低頻率下運行,有走步不均勻性現象。本文對此進行了詳細分析,并提出了下橋臂恒流值可變式恒流斬波驅動方案。
 ?
? 式中N—每相繞組的串聯匝數;NI—每相繞組的磁動勢;Z2—轉子的齒數;θ—矩角;Ad—直軸磁導;Aq—交軸磁導。
電磁轉矩最大值Tmax與每相繞組磁動勢(或相電流)的平方成正比,所以步進電動機屬于對繞組電流十分敏感的傳動電動機。
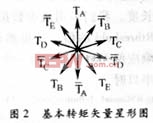
主電路如圖1示,下橋臂電流恒定值固定為相繞組額定電流的兩倍2I。以半步運行為例,4-5勵磁的20種通電狀態中4相勵磁與5相勵磁交替進行,根據環分控制邏輯不難分析,主電路穩態等值電路基本結構為4拍一循環,所以單步響應特性也是4拍一循環。混合式步進電動機的驅動控制主要體現為對轉矩矢量的控制,而繞組電流又直接與轉矩相關。以一相繞組通以額定電流I產生的定位轉矩T為基準,首先分析相鄰4拍 繞組電流及其相應派生定位轉矩矢量的變化規律。
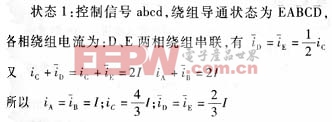
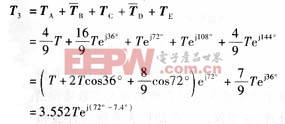
派生定位轉矩矢量為:

派生定位轉矩矢量為

派生定位轉矩矢量為
 ?
?
從以上分析可以看出:派生定位轉矩矢量變化不均勻,表現在大小上不一樣,轉矩波動相當明顯,最大值是最小值的2.15倍;相位變化也不均勻,5相勵磁產生了附加步距誤差。這些因素反映在步進電動機低頻運行時,走步有明顯的“強”“弱”或“重”“輕”,加劇了電機的低頻震蕩,這對低速工作是不利的,另外步矩角的不均勻也影響到系統的脈沖當量。
派生定位轉矩矢量為:
派生定位轉矩矢量為
派生定位轉矩矢量為
? 從以上分析可以看出:派生定位轉矩矢量變化不均勻,表現在大小上不一樣,轉矩波動相當明顯,最大值是最小值的2.15倍;相位變化也不均勻,5相勵磁產生了附加步距誤差。這些因素反映在步進電動機低頻運行時,走步有明顯的“強”“弱”或“重”“輕”,加劇了電機的低頻震蕩,這對低速工作是不利的,另外步矩角的不均勻也影響到系統的脈沖當量。
若改下橋臂恒流斬波的電流恒定值隨繞組勵磁狀態變化,可以改善定位轉矩矢量變化的均勻性。具體分析如下。

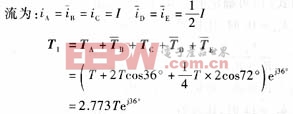
條件:B相下橋臂恒流斬波的電流恒定值為2I;D相下橋臂恒流斬波的電流恒定值為1.5I。各相繞組電
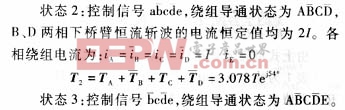
條件:D相下橋臂恒流斬波的電流恒定值為2I;B相下橋臂恒流斬波的電流恒定值為1.5I。各相繞組電
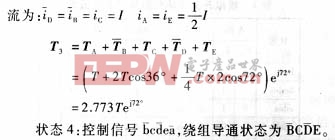
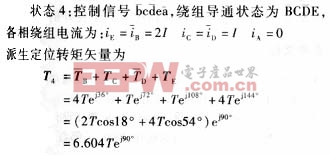
條件:D相下橋臂恒流斬波的電流恒定值為2I;A、E相下橋臂恒流斬波的電流恒定值為I;各相繞組電

由以上分析不難看出,派生定位轉矩矢量變化的均勻性得到較大改善,轉矩波動相當小,最大值僅是最小值的1.11倍,且無附加步距誤差。
條件:B相下橋臂恒流斬波的電流恒定值為2I;D相下橋臂恒流斬波的電流恒定值為1.5I。各相繞組電
條件:D相下橋臂恒流斬波的電流恒定值為2I;B相下橋臂恒流斬波的電流恒定值為1.5I。各相繞組電
條件:D相下橋臂恒流斬波的電流恒定值為2I;A、E相下橋臂恒流斬波的電流恒定值為I;各相繞組電
由以上分析不難看出,派生定位轉矩矢量變化的均勻性得到較大改善,轉矩波動相當小,最大值僅是最小值的1.11倍,且無附加步距誤差。
按照改進方案,每相下橋臂恒流斬波的電流恒定值隨繞組勵磁狀態變化,在下橋臂開通時根據勵磁狀態不同有I、1.5I和2I三種取值,電路如圖3,通過開關切換改變電阻分壓值得到所要求的電流設定值。模擬開關k1a和k2a可采用CD4066集成電路實現。
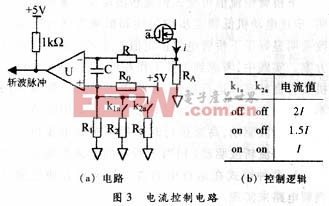
由式(1)可確定電阻R?0和R?1的阻值。
k1ak2a=10時,比較器U“+”端門限值為
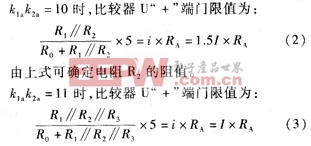
由上式可確定電阻R3的阻值。
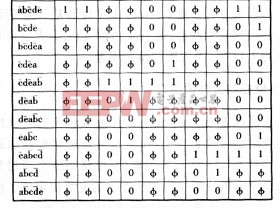
表1為整個五相電流控制開關與環分信號對應的開關真值表。某相下橋臂未開通時,表中的邏輯值為隨意值。開關真值表可結合環分信號用EPROM或CPLD等器件來實現。












評論