基于MSP430單片機的光電跟蹤伺服系統研究方案

研究設計中利用光敏感器件對特定光波長范圍的光信號敏感原理,將四象限光電位置探測器與MSP430系列單片機相結合,根據四象限光電探測器輸出電壓與光斑位置的線性關系,通過數字PID閉環控制輸出電壓調節單片機輸出PWM 的占空比來實現精確穩定的搜尋和小范圍跟蹤目標。
0 引言
光電跟蹤系統是以光電器件(主要是激光器和光電探測器)為基石,將光學技術、電子/微電子技術和精密機械技術等融為一體,形成具有特定跟蹤功能的裝置。
目前國內外較先進的光電跟蹤系統多以激光測距儀、電視跟蹤儀和紅外跟蹤儀三位一體為核心構成。采用機械方法實現跟蹤系統控制起來還不太靈敏。對于一個光電追蹤系統,一般通過目標識別、位置信號檢測、位置信號處理、PID伺服控制計算、驅動控制、位置反饋、目標不間斷跟蹤,完成特定跟蹤任務。而與之配套的目標識別檢測處理與PID 伺服控制實現是非常重要的部分,是保證整個系統能否正常工作的關鍵。
為更好地實現精確的跟蹤伺服系統,本方案中使用MSP430 單片機完成對目標定位跟蹤的PID 閉環控制,采用S066A 的國產四象限探測對目標進行識別跟蹤定位。MSP430 單片機是美國TI(德州儀器)公司近年推出的16 位高性能混合信號處理器。由于它具有處理能力強、運算速度快、集成度高、外部設備豐富、超低功耗等優點,因此在許多領域內都得到了廣泛的應用。S066A 國產四象限探測器光譜響應范圍在400~1 100 nm,它的峰值波長為940 nm,它具有較高的靈敏度和精確度,廣泛運用于位置檢測,光學定位,距離探測等方面。
本研究方案的意義在于一方面對四象限探測器件以及新式低功耗高集成的微處理器的使用和推廣;另一方面探索一種新的機械對準結構設計以及為低成本跟蹤系統的研制提供一種可行性方案。
1 總體設計方案
整個系統的設計如圖1 所示,主要由機械傳動設計和系統電路設計兩部分組成。
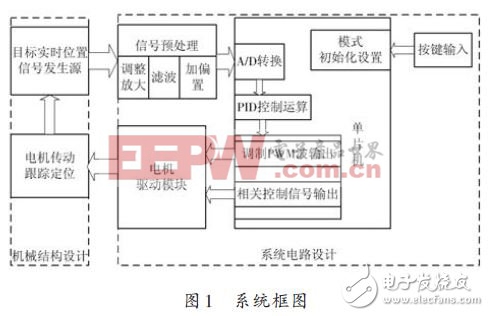
機械部分中目標實時位置信號發生源采用四象限探測器對目標進行定位,并輸出包含目標位置信息的4 路電信號,電機傳動跟蹤定位則是根據四路位置信號來驅動探測器所在的定位面板對目標進行搜索和鎖定。機械部分將探測和定位集為一體,目標可見即可識,電機與定位面板的傳動以角位移為變量進行快速方便的傳動。系統電路設計部分中MSP430F169 片內集成了多個功能模塊。
本設計利用其作為處理核心,其片內A/D模塊實現模擬信號與數字信號的轉換。一方面Timer 對時鐘進行分頻從而提高時鐘頻率,使A/D獲得更快的采樣率或轉換速度,以保證A/D 轉換的精度;另一方面Timer的輸出端單元可作為PWM信號發生器根據片內編程進行PID 高速運算處理所得結果產生PWM 輸出控制信號,設置簡單方便簡化了電路的設計,進而降低了系統設計的復雜性。接收前端的位置信號使用低偏置,高精密度放大器對信號進行調整,利用濾波器對位置信號進行優化,以滿足更好的精度和定位要求。在控制信號輸出端采用現有的電機驅動芯片確保電機的穩定運行。基于總體設計方案,本文將其劃分為4個不同但又彼此相互作用的4個方面來實現該研究。具體包括硬件電路設計、機械模擬模型設計、PID算法設計以及軟件編程。
2 硬件模塊設計
2.1 硬件電路設計原理
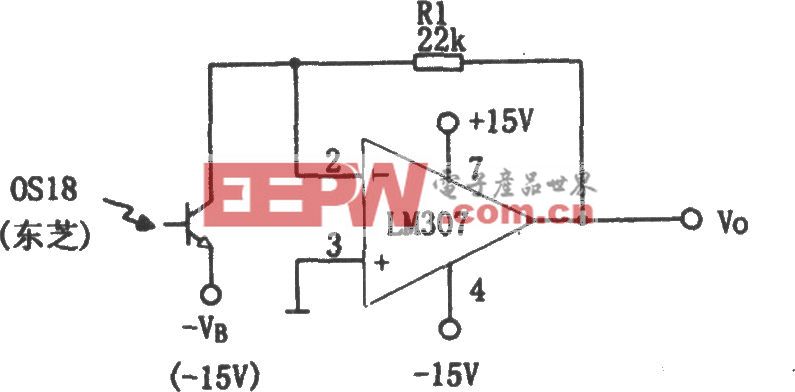
依據總體設計方案,硬件電路主要由電源模塊、四象限信號放大處理模塊、系統控制模塊、電機驅動模塊以及相關輔助模塊構成(見圖2)。
四象限探測器可探測波長范圍(380~1 1










評論