CCD圖像傳感器的原理及應用--μPD3575D


如將其準時鐘頻率確定為8.000MHz,即周期為125ns,那么,根據給出的最小值就可算出四路波形的周期和占空經,具體列于表3。
表3 四路驅動波形的周期的占空比
| φIO | φTG | φRO | φSHO | |
| 周期(ns) | 1750 | 1313000 | 875 | 875 |
| 占空比 | 1/2 | 1/751 | 6/7 | 5/7 |
根據各路波形的周期、占空經和它們之間存在的關系所給出的典型驅動電路如圖5所示。
5 CCD數據采集
CCD可用于位置、尺寸和圖像的檢測,根據CDD傳感器視頻信號應用的差異,CCD視頻信號的處理有兩種方法:一是對CCD視頻信號進行二值化處理后,再進行數據采集;二是對CCD視頻信號采樣、量化編碼后再采集到計算機系統。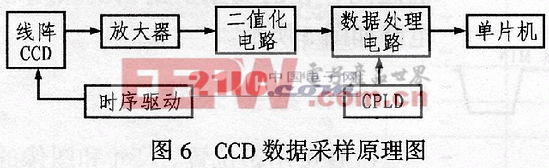
在檢測鋼軌不平順的設計中要檢測運動光源的瞬時位置,只需要測定光源在CCD上的成像位置,即光源成像在第幾個像元上。圖6為CCD數據采集原理圖,采用二值化方法。
由于線陣CCD既具有高靈敏度的光電轉換功能,又具有光電信號的存儲和快速讀出功能,所以通過一組時序脈沖的驅動控制(驅動器),可以實現對目標光源的實時光電轉換與信號讀出。當入射在CCD像元上成像時,入射光子被CCD像元吸收并產生相應數量的光生電荷。在光積分期間,光生電荷被積累并存儲在彼此隔離的相應像元的勢阱中,在每個像元勢阱中所積累的信號電荷數與照射在該像元面上的平均照度和光積分時間的乘積成正比。在電荷轉移期間,光生電荷依次轉移稱至輸出區,通過復位脈沖的控制,在輸出極形成視頻信號,每次積分的輸出波形代表目標光圖像在CCD采樣方向的瞬態強度的空間分布,輸出視頻信號經過低噪聲寬帶放大器放大處理后,每個光斑的輸出波形如圖7(a)所示。然后,對CCD的視頻信號進行二值化處理,原理如圖7(b)所示,二值化的前沿和后沿分別對應CCD像元的信號,計算出這兩個像元位置的平均值,即為光線的中心位置,這即是一個檢測數據。在CCD連續工作下,所有的檢測數據經數據處理后,通過串行通訊電路將結果傳送給單片機。
在進行CCD在線檢測時,干擾光線較難克服,而且光源使用一段時間,光強也會變弱,這樣會引起CCD輸出信號幅度變化,從而導致測量誤差,因此對上邊的電路作了一定改進,即讓閾值電壓隨CCD視頻信號的幅值變化,改進后的浮動閾值電路如圖8所示。當光源強度變化引起CCD視頻信號變化時,可以通過電路CCD視頻信號的起伏反饋到閾值上,使閾值電壓隨之改變,從而保證在光較弱時,二值化電路仍能輸出合適的二值化信號。
二值化處理后輸出的信號稱為二值化信號。二值化信號為一個方波,該波形的前沿和后沿分別對應CCD像元的序號,計













評論