UHF RFID讀寫器的設計方案(一)

為了分析UHF RFID讀寫器系統抗干擾性能,本文提出了基于ISO18000-6 type B 協議下UHF RFID讀寫器的設計方案,并對其通信過程進行了Simulink仿真,給出了曼徹斯特編解碼以及2ASK調制解調的模型。
最后,結合實際中經常遇到的高斯白噪聲信道分析了系統的信道抗干擾性能,給出了系統的誤碼率隨信噪比變化曲線。仿真表明本方案所設計的UHF RFID讀寫器系統具有較高的抗干擾性能。
0 引言
射頻識別系統是一種非接觸的自動識別系統,通過射頻無線信號自動識別目標對象,并進行讀、寫數據等相關操作,這種無線獲取數據的方式在工業自動化、商業自動化、交通運輸控制管理眾多領域得到廣泛應用。
RFID系統由閱讀器、電子標簽和計算機網絡構成,其中讀寫器是RFID系統信息控制和處理中心,在系統工作中起著舉足輕重的作用,其性能的好壞直接影響到數據獲取的可靠性和有效性。而超高頻讀寫器在遠距離識別以及高速數據讀取方面有著顯著的優勢,為此本文研究基于ISO 18000-6標準的Type B協議下的高頻讀寫器具有重要的現實意義。
1 RFID工作原理
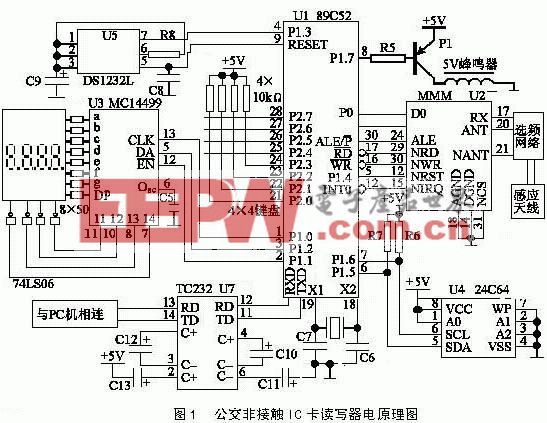
不同的RFID系統,工作原理略有不同,但其依據的基本工作原理是一樣的。RFID系統讀寫器與電子標簽基本結構如圖1所示。由讀寫器模塊中振蕩器產生射頻振蕩信號,經過載波形成電路產生載波信號,再經過發送通道編碼、調制和功率放大后經天線發出射頻信號,當電子標簽進入到工作區域,讀取讀寫器發送的信號,一部分用于產生能量驅動電源激活自身工作,一部分用于獲取信息,并根據指令將帶有自身信息的信號經過編碼、調制后由天線發送給讀寫器。讀寫器再將讀取的信號傳送給數據處理模塊進行相應操作。
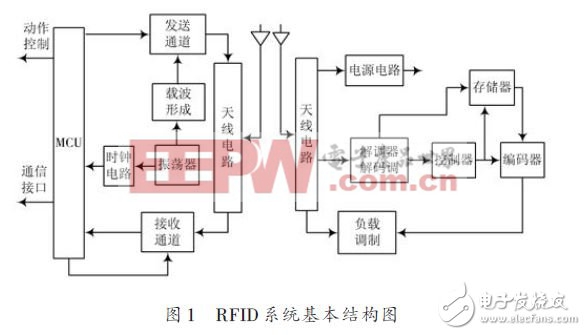
讀寫器在RFID 系統中扮演重要的角色,主要負責與電子標簽的雙向通信,同時接收來自主機系統的控制指令。各種讀寫器雖然在耦合方式、通信流程、數據傳輸方法,特別是在頻率范圍等方面有著根本的差別,但是在功能原理上,以及由此決定的構造設計上,各種讀寫器是十分類似的。在ISO18000-6 Type B 協議下RFID 系統是基于讀寫器先發言原理工作,即讀寫器先發送出一定頻率的射頻信號,當電子標簽進入到該工作區域時,首先產生感應電流對自身激活,進而發射出帶有自身信息的信號,讀寫器讀取該信號后送到信息處理中心并進行相應的處理。
2 UHF RFID讀寫器設計
超高頻射頻識別系統采用的頻率主要位于ISM 頻段,基于ISO 18000-6標準的射頻識別系統的頻率主要位于860~930 MHz,常用頻率為915 MHz.在該頻段下,電子標簽的識別距離一般能達到1~10 m,而電子標簽的識別距離取決于讀寫器的輸出功率,識別距離越遠,其被識別的準確率越高,但同時讀寫器輸出功率越高,其造價及技術難度將越高,實際應用中,一般根據系統要求來確定實施方案。
2.1 讀寫器的編解碼模型設立
在RFID 中,為了使讀寫器在讀取數據時能很好地解決同步的問題,往往不直接使用數據的NRZ 碼對射頻進行調制,而是將數據的NRZ 碼進行編碼變換后再對射頻信號進行調制。在ISO18000-6 TypeB協議下,使用的是曼徹斯特編碼。其編碼原則是,當原始數據為“1”,將其編碼為“10”;當原始數據為“0”,將其編碼為“01”。這種編碼的特點是每個碼元中間都有跳變,低頻能量較少,便于接收端提取時鐘信息。
仿真實現時,用一個頻率為原始數據發送頻率2倍的矩形波與原始數據做異或運算即可實現曼徹斯特編碼。對曼徹斯特編碼進行解碼的目的是從接收到的曼徹斯特碼流中恢復出原始信號,仿真實現時可以使用和編碼相反的方法,即用一個頻率為原始碼流一半的矩形波與原始數據做異或運算即可實現曼徹斯特解碼,其仿真模型如圖2所示,仿真結果如圖3所示。曼徹斯特編解碼后的輸出信號與原始信號保持一致,符合








評論