基于微機電系統的無線鼠標方案

2.2 發射端
加速度傳感器采集加速度信號,單片機通過軟件實現對加速度信號的二重積分而轉換為位移信號,經編碼處理至藍牙發射芯片,通過天線將數據發射出去。
2.2.1 加速度傳感器電路
采用ADI的低成本、低功耗雙軸單片加速度傳感器 ,其可測量加速度范圍至少在 ±2g 以上 ,可以測量動態加速度(比如振動)和靜態加速度(比如重力加速度),其輸出的占空比是和加速度的大小成一定的線性關系,并且可以直接被單片機(MCU)采樣而不需模數轉換(ADC)。工作周期則可以簡單地通過RSET來調節 ,范圍在0. 5m s到10m s之間。帶寬可以通過調節XFLT和管腳上的電容Cx和Cy來確定, 本方案中選用Cx=Cy= 0.10μF, 故 ,需要注意的是,加速度傳感器在平動時會在相應的方向產生與加速度相關的輸出,在轉動的時候也是如此 ,本方案中我們假設鼠標在水平面使用 ,因此我們只需要一片加速度傳感器就可以解決問題 ,加速度的大小可以通過 T1/ T2 = 11% 3A+ 50%這個線性比例關系獲得 其中 T1表示工作周期中高電平部分的長度 , T2表示整個工作周期的長度 , T1/ T2就是輸出占空比的大小,A 是加速度大小 ,而加速度的方向可以通過其正負性來判定。
,需要注意的是,加速度傳感器在平動時會在相應的方向產生與加速度相關的輸出,在轉動的時候也是如此 ,本方案中我們假設鼠標在水平面使用 ,因此我們只需要一片加速度傳感器就可以解決問題 ,加速度的大小可以通過 T1/ T2 = 11% 3A+ 50%這個線性比例關系獲得 其中 T1表示工作周期中高電平部分的長度 , T2表示整個工作周期的長度 , T1/ T2就是輸出占空比的大小,A 是加速度大小 ,而加速度的方向可以通過其正負性來判定。
2.2.2 占空比輸出解碼
對于每一個軸,傳感器的輸出電路把模擬信號轉變成占空比調制的數字信號,這樣就可以通過MCU 的定時/計數器解碼獲得加速度信息,其大小可以通過下式計算得到:
由于每個器件存在差異,其 0g輸出和靈敏性會因為溫度、噪聲等原因而不同,為實現高精度測量,0g的偏移量和比例因子必須按照實際測量所得。本方案在TA=25℃,VDD=3V,RSET=125KΩ,中測得:
為了實現高精度測量,考慮到T2易受溫度漂移的影響,必須周期性地更新T2的平均值。一種新的改進型脈寬調制(PWM)解碼方法是通過占空比調制在X軸和Y軸使用相同的三角形參考波 ,使得每個周期中 T1的中點達到同步 ,這種方法能加快數據傳輸時間,也稱之為高速解碼,X軸和Y軸的占空比輸出如圖2所示。
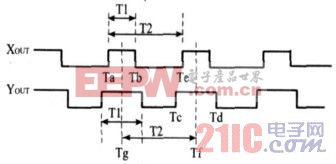
圖2 X軸和Y軸的占空比輸出
單片機軟件編程實現獲取加速度信息的流程圖如圖3所示。
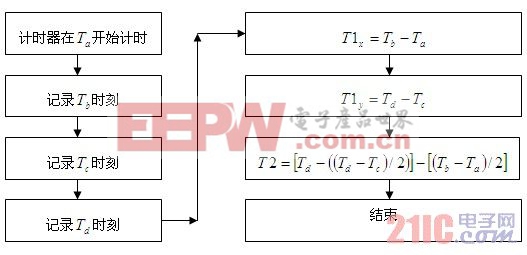
圖3 ADXL202E高速解碼技術流程圖
2.2.3 軟件實現獲取位移信號
如何實現高精確度且易于編程的二重積分算法是把加速度信號轉換為位移信號的關鍵所在,用積分電路來實現二重積分的誤差較大,因此擬用軟件編程來實現二重積分的算法 ,并且先在 matlab環境下用動態系統的simulink模型模擬 FFT、辛普生公式等不同的積分算法 ,來進行算法的比較與選擇 ,通過加速度傳感器鼠標的 simulink模型對實際位移和軟件實現的位移信號進行比較,誤差控制在在0.5%以內,滿足鼠標設計要求。



評論