基于超聲波測距的二維倒車雷達系統設計

2.3 溫度補償模塊設計
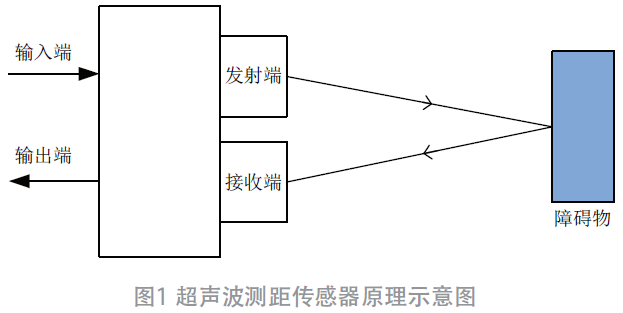
超聲波在空氣中以縱波方式傳播,其傳播速度受氣體的密度、溫度及氣體分子成分的影響,其中溫度對聲速影響較大。考慮溫度對聲波速度影響時,聲波在空氣中的傳輸速率為:
V=331.5+0.606T (6)
其中,V為聲速,T為攝氏溫度。
采用美國DALLAS公司數字溫度傳感器DS18B20實現對環境溫度測量,根據測得的溫度對聲速進行校正,以減小環境溫度對聲速的影響。DS18B20所構成的溫度補償電路具有體積小、電路簡單、測量精度高等優點,只需連接到單片機的一個I/O端口就能實現與單片機之間的雙向通信,測溫范圍為-55~125℃,在-10~85℃溫度范圍內的精度可達±0.5 ℃。
2.4 智能語音報警模塊設計
采用NV020多功能語音芯片作為語音報警模塊的核心元件。該芯片工作電壓范圍為2.7~3.6 V,內建16位D/A音頻輸出,自帶內部濾波音頻功放,可以直接驅動8 Ω/0.5 W的揚聲器,具有高音質、低噪聲的特點,可構成按鍵控制模式、一線串口連接以及三線串口連接3種工作方式。使用時,只需通過單片機尋址所存儲的提示語音即可實現調用播放,發送不同命令碼可實現音量調節、語音播放、暫停等功能。
3 系統軟件設計
系統軟件設計以Keil C51為集成開發環境,采用C語言模塊化方式進行系統應用程序編寫,軟件流程如圖5所示。
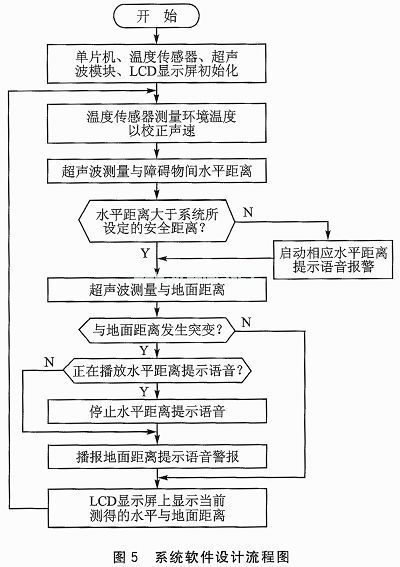
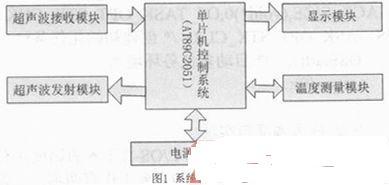
汽車掛倒檔時系統上電,首先完成單片機、超聲波測距模塊、數字溫度傳感器及LCD顯示屏的初始化設置,如具體工作模式、顯示方式等。然后,利用溫度傳感器對當前環境溫度進行實時采集以實現聲速校正。然后超聲波水平測距模塊檢測與車后障礙物的水平距離,當檢測到的水平距離小于系統所設定的安全距離時,立即啟動水平距離提示語音,提醒駕駛人員立即停止繼續倒車。
同時,超聲波地面監測模塊測量汽車尾部與地面成60°處的距離,并判斷該距離是否發生突變。若檢測到的地面距離發生突變,則判斷語音報警模塊是否正在播放水平距離提示報警語音,若符合判斷,則立即停止水平提示報警語音的播放改為進行地面監測語音報警,否則直接進行地面監測語音報警。若沒有發生突變,則不進行語音報警提示,而將所檢測到的倒車時的水平與地面距離顯示在LCD顯示屏上,以便駕駛人員獲取相關的實時數據,提高倒車的安全性。
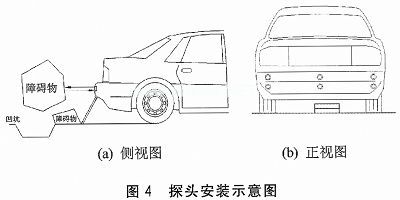
4 實驗測試
系統性能實驗測試,包括水平測距與地面監測兩大部分。系統水平測距的實驗數據如表1所列。其中,實際值為卷尺所測量的超聲波探頭與墻壁之間的距離,測量值為所設計系統中的LCD顯示值。由表1可知,系統可在3~400 cm實現水平距離準確測量測距,最大誤差僅為1.10%,滿足倒車需求。

同時,經過多次測試發現,系統均可及時監測出所設定的10 cm以上的凸起及凹坑,并給出相應提示語音警報,系統工作穩定可靠。
結語
通過斜面測距理論分析以及相關實驗可知,地面監測模塊方向與地面夾角為60°時,滿足系統的精準性和實時性要求。
實際運行測試結果表明:結合所設計的溫度補償算法,系統可實現水平精確測距、地面凸起或凹坑的精準識別以及提示語音警報,且可在LCD屏上實時顯示水平與地面監測距離。與傳統的一維倒車雷達系統相比,提高了倒車安全性,且該系統設計思路同樣適用于盲人導航、機器人定位等場合,具有較高的實際應用價值。


評論