CAN總線在混合動力汽車中的應用研究

2.3數據信息編碼定義
本系統CAN總線采用29位標識符,滿足通常混合動力汽車控制中控制命令、工作狀態、測試數據傳輸的要求。每幀信息最多8個字節的數據不會占用總線時間過長,從而保證了數據通信的實時性。由于信息量較多,在此僅以電池管理系統發送的兩幀數據為例,介紹通信地址及信息定義,見表2、表3(表3中X表示不存在或保留)。

表2 通信地址分配表

表3 參數字節定義
在數據打包過程中,對于有相關關系的數據打包到一個消息幀,以保證數據發送效率,充分利用通信帶寬。對于需要快速發送的數據,數據長度盡可能短,以保證傳輸時間足夠短,提高數據傳送的實時性。
2.4消息調度
消息調度是CAN總線應用協議的重要部分。為了保證總線通信的實時性,減少總線通信的通信量和負載,需要合理的調度方式。為了實現系統控制目標,在通信協議中定義了事件觸發、定時發送和應答響應3種調度方式,分別調度非周期實時性消息、周期實時性消息、周期非實時性消息、非周期非實時性消息以及查詢消息。在定時發送的調度方式中,按照控制系統對其實時性要求的高低,依次設定了10、50、100、200、500ms的時間間隔。如動力總成控制器發送給電機的扭矩控制指令,由于實時性要求較高,采用了10ms更新一個數據,而實時性相對較低的量(如電池組的電氣狀態)則采用了100ms發送一次。為了發揮CAN系統中遠程幀(由節點發送,以請求發送具有相同標識符的數據幀)的優勢,還采用了應答響應的調度方式,如協議中電池單體模塊狀態信息,如果要每個電池單體模塊狀態信息都傳輸的話,必將帶來總線的負載的增加,同時從控制角度來看,也沒有這樣的必要,因此,采用了遠程請求的方式來傳輸。圖2是CAN信息發送流程圖,圖3是CAN信息中斷接收流程圖。
2.5故障診斷及處理
系統運行時的故障和處理主要由各ECU來處理,并向CAN總線發送信息。具體為:電機故障主要由電機控制器來監測,然后通過CAN總線發送到網絡上,主控制器接收故障信息并判斷是否為重大故障,如是重大故障則采取相應措施,切斷主繼電器,動力電池停止供屯如果是一般故障則采取相應的策略排除故障;電池故障由電池管理系統監測,并向網絡發送信息,主控制器收到故障信息后,作相應處理,故障也分一般故障和重大故障。CAN總線通信是XL2000混合動力轎車控制的紐帶,總線通信的故障主要是總線節點脫離,或是負載過高導致嚴重事故,所以要隨時監控電機控制器、電池管理系統的節點狀態和總線的負載。如果節點脫離,則需要停車重啟控制系統;若是負載過高,則報警。
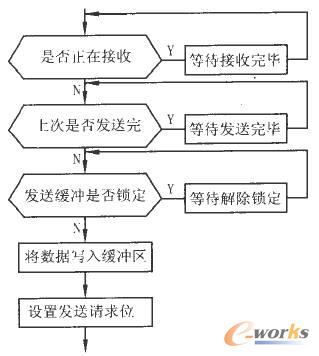
圖2 CAN發送流程圖
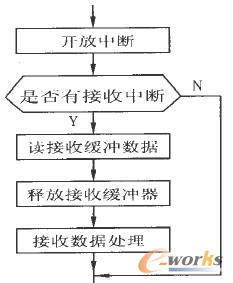
圖3 CAN接收流程圖
3 試驗驗證
系統采用250Kpbs的通信波特率,結合臺架試驗和CAN總線實際通信。結果證明:系統各ECU工作正常,各控制器之間通過CAN總線通信,實現了傳感器測量數據的信息共享、控制指令的發送和接收,達到了系統設計指標及功能;CAN總線工作穩定、可靠,具有較強的抗干擾能力,完全滿足混合動力汽車實時控制要求。圖4~圖7發動機轉速在1200、1600、2000、2400 r/min下XL2000混合動力汽車臺架試驗系統負荷特性試驗曲線,除去燃油消耗外,其它的數據信息是通過CAN總線接收的。其中,曲線系列1~系列7分別為司機踏板位置(%)、節氣門開度(%)、發動機水溫、燃油消耗率、系統扭矩輸出、電機扭矩指令、電機的電壓、電流、電池的剩余電量。

評論