基于CAN總線的遠程監測儀器系統

本文引用地址:http://www.j9360.com/article/201612/332329.htm
網絡通信系統的主要功能包括:
(1)監控機將當前的監控配置參數通過CAN總線通信轉換卡轉換為CAN總線信號傳送給網絡數據采集器;
(2)監控機接收數據采集器發送來的實時數據;
(3)當監測的工藝參數超過預警及報警限值時,將報警原因、設備編號、運行時間等報警信息自動優先發送給監控機;
(4)監控機優先接收報警信息;
(5)監控機向網絡數據采集器發送進行參數設定的命令;
(6)監控機接收網絡數據采集器返回的應答信號。
基于CAN技術規范和通信規約設置CAN網絡協議并通過Vc++6.0編制多個通信子函數來實現上述功能。在試驗過程中,分別對不同的CAN總線通信波特率進行了測試,結果表明:在波特率為125Kbit/s時,通信可靠,上述各方面的功能實現良好,并且在該通信波特率下,CAN總線的最大傳輸距離約為500m,基本可以滿足制造企業車間內設備的監測與控制。
3 數據采集系統
數據采集系統是多功能轉子試驗平臺網絡測控的重要組成部分。它完成信號采集和實時數據的提取,給信號分析、處理,及故障診斷提供基礎。振動信號通過傳感器及導線與網絡數據采集器的電荷端或電壓端(如果采用電壓輸出的傳感器)相連。該網絡數據采集器,在實現在線式狀態監測方面有很多優點,其主要特點如下:
(1)振動加速度、速度、位移、包絡一次測量。
(2)8×2路同步測量,可接ICP加速度、電渦流位移或電磁式速度傳感器。
(3)14位A/D采樣,80DB動態范圍。
(4)采用CAN總線傳輸,傳輸速率可達125Kbit/s(50m),可靠性高,通信波特率可由用戶選擇。
(5)提供四路速度測量信道,也可用作外觸發信號的輸入。
(6)可在計算機上發出聲光報警。原理圖如圖3所示。
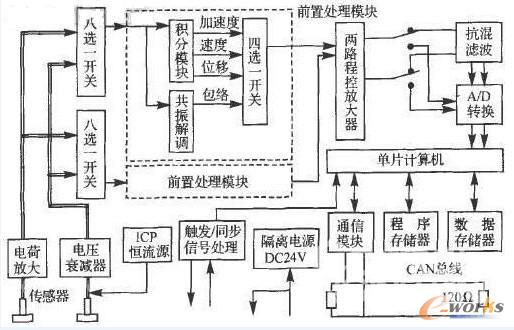
圖3 網絡數據采集器原理圖
4 信息管理系統
為了增加系統的可靠性,上位機信息管理系統可由多臺微機組成,在每臺微機上配有CAN通信卡和網卡,通過集線器和CAN總線可以組成局域網,實現上位機之間的數據共享,在數據量不大的情況下,上位機可由1臺微機組成,對現場設備進行實時協同監控,并對采集的多通道數據進行及時分析。在上位機信息管理系統中,編制了數據采集程序并利用標準工業組態王軟件對現場進行狀況進行監測。通過網絡數據采集程序設置各通道的參數,按要求定時接受各網采發送的振值或轉速信息,也可對數據進行存儲、查詢和刪除;并通過DDE動態地將采得的數據傳送給編寫好的組態軟件工程;運行完網采程序,然后運行組態王軟件,這樣組態王軟件就和服務程序建立連接,顯示運行畫面,畫面中各變量將根據上傳的數據自動更新,即可達到遠程實時監控的目的。圖4是采用加速度傳感器對設備進行監測時的數據采集試驗結果,通過菜單可以切換不同的界面,很方便的實現各種功能。
5 結束語
基于CAN總線的遠程監控系統,在多功能轉子試驗臺上實驗效果顯著。系統實時性強,可靠性高,結構簡單,在實際應用中達到了設計要求,可切實地解決生產線產品的網絡實時監測,同時為制造企業的生產線網絡協同監控提供了理論和實踐基礎。該系統可廣泛應用于實時數據采集、振動分析、遠程故障診斷等諸多領域。

評論