基于C8051F040的模型車無線控制系統的設計

3.2 電機控制模塊軟件設計
該模塊的軟件設計流程如圖6所示。本文引用地址:http://www.j9360.com/article/197800.htm
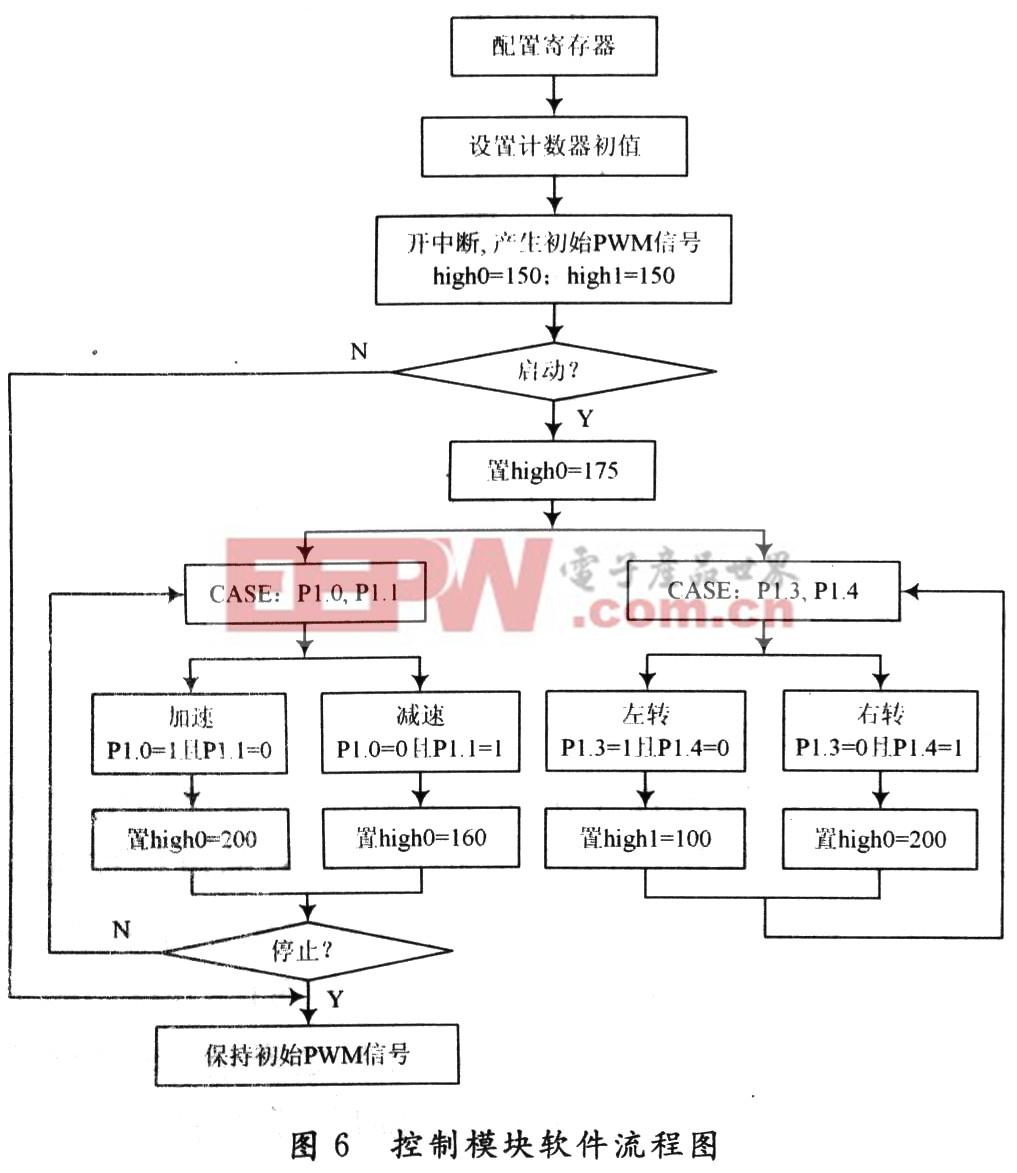
上電復位后,首先完成單片機的初始化,包括看門狗初始化,輸出口定義,交叉開關配置,配置時鐘寄存器,T0時鐘控制器。C8051F040單片機資源豐富,但基于51內核(特殊功能寄存器只有128個),其很多特殊功能寄存器便不能安排下,于是采用了分頁機制。所以在配置不同的寄存器時,要先使用選擇分頁。單片機內使用中斷方式產生PWM信號,定時單位設為0.01 ms,初始信號為周期16 ms,高電平時間1.5 ms,high0,high1分別控制速度控制波形和轉角控制波形的高電平時間。當接收到啟動信號后,P1.0,P1.1接收速度信號,P1.3,P1.4接收轉角信號。
4 結 語
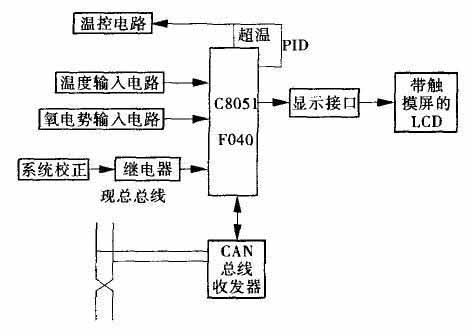
本文設計了以C8051F040為控制核心的仿真平臺,通過與上位機的通信,可以很好地滿足機器人仿真駕駛的要求。系統采用上位機無線控制物理模型的方式,使得仿真駕駛更加安全可靠。該系統具有很好的拓展性,通過無線通信,可以增加更多的數據采集系統用以反饋信息給上位機,拓展了該平臺的應用范圍。如增加定位反饋系統,則上位機可以屏蔽物理模型的運動進行算法模擬及試驗。在參數方面,可以增加高精度的測定反饋系統,通過與上位機保持實時的通信來滿足更高的仿真要求。

評論