CAN總線在發動機測試系統中的應用

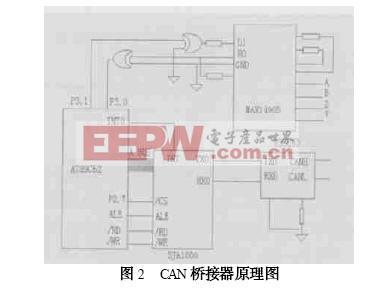
在圖2所示的電路中實現了RS-422電平和CAN標準邏輯電平的相互轉換,同時系統軟件也實現了RS-422和CAN幀格式的相互轉換,系統中CPU為AT89C52單片機。
芯片MAX1490B完成了RS-422和TTL邏輯電平的相互轉換,而芯片SJA1000則完成了TTL邏輯電平和CAN邏輯電平的相互轉換,在MAX1490B中TTL側和RS-422側實現了完全電隔離,A、B為其RS-422側輸入端,Y、Z為RS-422側輸出端,DI為隔離的TTL側驅動輸入,RO為隔離的TTL輸出端,MAX1490B內部的DCPDC 變換器在不需要外部隔離電源的情況下實現了輸入輸出的電隔離。82C250是CAN總線通信控制器,由其實現CAN的物理層和數據鏈路層,是CAN總線收發器,可支持多達110個節點的CAN總線負載。
測控設備的改造
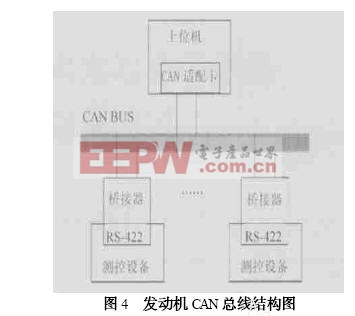
原有的系統采用了下位控制,即將控制權限和管理權限在每一獨立的系統中單獨實現,數據的輸出,給定控制目標以及各種工況的信息打印均由前端機控制,上位機只是用來對系統進行簡單的數據匯總通訊。在原系統中每個測控設備是孤立的,是信息孤島,在改造過程中上位機中配置CAN適配器,用雙絞線與CAN總線相連,在原測控設備上利用預留RS-422與CAN橋接器相連。在軟件編程中,增加了單獨的通信單元,不增加原有的控制系統的其他功能和軟件開銷,經過簡單的軟硬件改造后,形成了一個具有數據交互功能的測控系統。改造后的系統能夠通過上位機對前置機進行控制工框的設定、數據采集匯總等,可以通過上位機對前置機進行控制,突破了原有系統的信息交互的障礙。系統拓撲結構如圖4所示。
結束語
經過改造后的測控設備連成了一個CAN總線系統,突破了原有的信息孤島的模式,原系統中的各種工作模式、各種控制目標給定由上位機管理,下位機通過接收廣播、點對點方式和上位機通信,接受工況狀態的轉換以及控制給定等參數,同時定期上傳其工作狀態、測試數據等,上位機對其進行統一管理,實現了“分散控制,集中管理”的模式。上位機通訊管理軟件的編制采用DELPHI5.0,在WIN2000下編譯完成。
通過對原有系統進行總線升級改造,針對原有測試系統進行現場總線改造的嘗試,也具有積極的實際意義。








評論