Buck變換器的數字模糊PID控制

A=;B=;C=;
Uin為輸入直流電壓;
Uout為輸出電壓。引入小信號變量:x=X+,uin=Uin+,及d=D+代入式(1)得:=A+B+E(3)式中:E=;
D為占空比。
式(3)即為Buck電路動態小信號狀態平均方程,將式(3)轉換到s域并解之,可得到電壓反饋控制下動態小信號模型的傳遞函數:=(4)
3模糊PID控制實現由式(4)可知,電壓反饋控制為二階系統,而二階系統是一個有條件的穩定系統,只有對控制電路進行精心設計和計算,滿足一定條件,才能使閉環系統穩定工作。考慮到輸入電壓變化量和占空比變化量(s)均對輸出有影響,變換器系統的開環控制框圖如圖2所示。
圖中N(s)為變換器輸出對d(s)而言的系統開環傳遞函數,G1(s)可由(4)得出:G1(s)=
在電壓負反饋控制中,如果引入輸入電壓前饋校正控制環,就能消除輸入電壓波動對系統的干擾,進而很好地改善系統的控制性能。為進一步提高控制性能與精度,控制電路采用具有微分和積分控制作用的數字PID控制。PID控制器中微分控制能預測事物的變化趨勢,可以補償由低通濾波器引起的時間滯后;積分控制能消除系統靜態誤差。從而采用PID控制,能增加系統的快速性和有效抑制超調,使系統動態性能和控制精度得以改善。由系統的BODE圖(圖3)可以看
(a)開環系統的頻率特性
()開關電源
(a)系統輸入電壓階躍變化(b)受擾動電壓負反饋控制波動圖
(c)受擾動PID控制波動圖(d)受擾動模糊PID控制波動圖
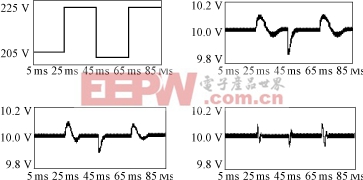
圖6仿真結果
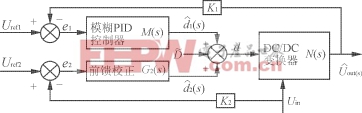
圖4Buck變換器模糊PID閉環控制框圖
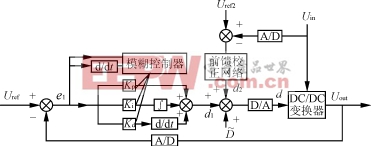
圖5Buck變換器模糊PID控制框圖







評論