基于單片機的船舶輔助鍋爐智能控制系統

3.1.2 本系統CPU采用8032單片機,在此基礎上進行以下擴展:以一片16K×8 位CMOS靜態E-PROM27128作為程序存貯器,以一片8K×8位CMOS靜態RAM6264作為數據存貯器,附加一片DS1216多功能日歷時鐘,DS1216器件內部包含振蕩電路和后備鋰電池,它的上面附帶有一個28腳插座,插入RAM6264后可以保持RAM中的數據在停電時也不丟失。以一片8155作為擴展I/O口,其中PA口作為檢測信號輸入口,PB口作為聲光報警輸出口。
3.1.3 輸出控制部分由信號輸出,信號驅動及驅動電機組成,控制信號由CPU經DAC0832數模轉換后送出,經驅動電路放大后送給驅動電機控制鍋爐風門及噴油電磁閥的開度,進而控制鍋爐內壓力的大小。
3.1.4 鍵盤顯示部分采用專用鍵盤顯示芯片8279,該芯片具有自動對鍵盤顯示器掃描并識別鍵盤上閉合鍵號的功能,不僅可以大大節省CPU對鍵盤顯示器的操作時間,從而減輕CPU的負擔,而且顯示穩定、程序簡單,不會出現誤操作。鍵盤部分主要用于輸入智能控制算法的一些初始值及參數,顯示器采用8 位LED顯示器。
3.1.5 監控定時部分,為防止由于外界電源、電磁輻射等引起的干擾使程序偏離正常的控制流程,進入死循環,造成系統故障,本系統利用定時器及分頻器,由硬件構成Watchdog,實現監視定時器定時復位功能。
3.2 軟件設計
軟件設計主要包括:水位控制,燃燒程序控制,壓力智能控制,安全保護等模塊。
3.2.1 工作原理
為了使鍋爐安全運行,控制鍋爐啟動有一定的程序,當鍋爐水位正常,即水位處于高水位與低水位之間(P1.1=0,P1.2=0),蒸氣壓力低于最大允許點火壓力(PA.1=1)時,風機將自動啟動(置P1.4=1),先進行40 s的預掃氣,此時風門最大(直接置DAC0832輸出為FFH),以排除殘存在爐膛內的油汽,防止點火時發生冷爆,預掃氣快結束時,接通點火變壓器(置P1.6=1),啟動燃油泵(置P1.5=1),把風門及噴油電磁閥開度調小(直接置DAC0832輸出為一個較小的值),以利于點火成功。這時爐膛內風、油、火齊全,如點火成功,光敏電阻阻值下降(PA.0=0),點火變壓器停止點火(置P1.6=0),這樣燃油經電磁閥繼續噴到已點著的火焰上,在風機的助燃下正常燃燒,進入壓力智能控制程序,如果點火失敗,光敏電阻阻值很大(PA.0=1),則系統發出點火失敗聲光報警(置PB.1=1),并自動進行第二次循環,關閉風門及噴油電磁閥(置DAC0832輸出為00H),從40 s預掃氣開始循環,若第二次循環仍未點火成功,系統停止工作(置P1.7=1)且聲光報警。
當正常燃燒突然熄火(PA.0=1),系統發出中途熄火聲光報警(置PB.2=1),同理,程序控制系統自動從頭開始,等待爐內壓力下降至PA.1=1,然后進入40 s預掃氣,重新點火啟動。
當鍋爐正常燃燒后,本系統按照智能控制算法控制風門及油門驅動電機以控制風、油門大小,使爐內壓力維護在一個穩定的范圍內。
本系統的水位控制由直接放在主程序之前及之后的高低水位判斷指令來決定是否啟停給水泵,若檢測到高水位信號(P1.2=1),說明之前啟動過給水泵,此時應停止給水泵工作(置P1.3=0)反之,若檢測到低水位信號(P1.1=1),則置P1.3=1,此時應啟動給水泵工作。
安全保護中的壓力危險(PA.2=1),水位危險(P1.0=1),中途熄火(PA.0=1)等保護也由接在主程序之后的判斷指令來完成的,若PA.2=1或P1.0=1,則停止系統工作(置P1.7=1)并且聲光報警,若PA.0=1,中途熄火,則關閉風油門(置0832輸出為OOH),停止風機及燃油泵工作(置P1.4=0,P1.5=0),并作中途熄火聲光報警,程序自動重新開始。
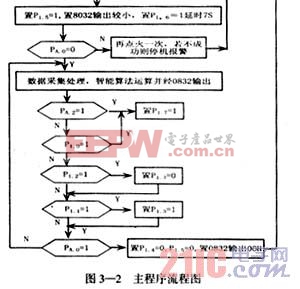
3.2.2 主程序流程圖
船舶輔助鍋爐微機控制系統的主程序包括系統初始化、鍋爐水位控制、燃燒程序控制、鍋爐蒸汽壓力自動控制、安全保護等模塊。其流程圖如圖3—2所示。
4 結束語
經樣機實驗證明本系統由于采用了基于8032單片機的智能控制方式,與全部采用繼電——接觸器或PLC的輔助鍋爐自動控制系統相比,具有硬件電路簡單、價格低廉、無觸點等優點,同時系統動靜態特性得到很大改善,系統的水位控制、燃燒程序控制、蒸汽壓力控制、安全保護、故障檢測等功能均由8032單片機完成,充分體現了單片機組成的系統的優越性。
[參考文獻]
[1] 喻方平等.微型計算機在船舶中的應用[M].電子工業出版社.
[2] 李朝青.單片機原理及接口技術[M].北京航空航天大學出版社.
[3] 涂時亮.單片微機控制技術[M].復旦大學出版社.
[4]冒天誠.船舶電力拖動自動控制系統[M].人民交通出版社.
[5] 李士勇.模糊控制、神經控制和智能控制論[M].哈爾濱:哈爾濱工業大學出版社,1993.











評論