基于GSM短信模塊的定位跟蹤系統設計方案

軟件設計采用了模塊化的設計方式,系統軟件由一個主程序和若干個子程序構成。主程序負責完成對各個功能模塊(子程序)的調用。系統軟件的其他部分還涉及到單片機與GSM 模塊之間的串行通信、單片機控制模塊中主機和從機間的SPI 模式通信、單片機對GPS 信息的解碼、對GSM-At 指令的編碼等。
主程序功能是:系統開機后對GPS 模塊、GSM模塊初始化,控制主機部分接收來自GPS 接收模塊的GPS 信息,篩選出其中的特定部分存儲,將數據以SPI 通信方式傳給從機;控制從機部分對信息進行編碼并傳送給GSM 模塊。主程序功能框圖如圖5所示。
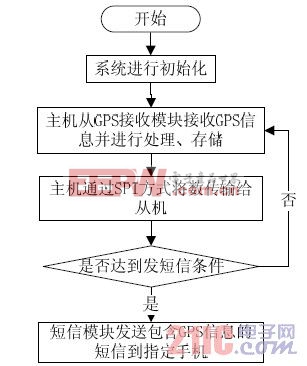
圖5 軟件系統的流程框圖。
2.1 系統初始化子程序
系統初始化子程序完成設置系統串口波特率、啟動串口、初始化數據存儲單元任務,實現單片機控制模塊、外圍器件以及GSM 模塊的初始化工作。
單片機控制模塊從機部分和GSM 短信模塊進行異步串行通信,需對串口進行設置:
(1)工作方式。
GSM 通信模塊的數據接口配置為8 位數據位、1 位停止位、無校驗位,因此設置單片機的串行口工作方式為異步通信模式。
(2)波特率設定。
Atmega16L 單片機控制系統的晶振為3.6864M,波特率需為9600b/s,所以根據記數初值的計算公式:X=256-fose × (1/384) × 波特率,UBRRL=0x16 (USART 通信)。
2.2 軟件定時程序
系統通過設置16 位定時器1 的寄存器初始值實現定時功能。系統采用頻率為3.6864MHz 的晶振, 機器周期近似為0.3 us , 初始化時預置TCNT1H=0xD4,TCNT1L=0xFF,(FFFFH-D4FFH)×0.3us=3.3ms,因此每3.3ms 中斷一次。流程圖如圖6 所示。
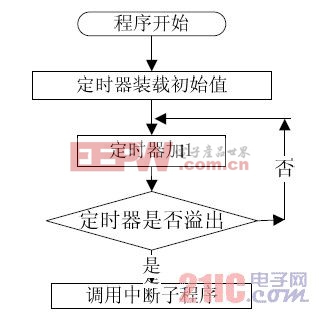
圖6 定時器中斷子程序
2.3 SPI 同步串行通信
使用SPI 主從模式進行通信關鍵是時鐘同步,一般為主機輸出同步時鐘,從機輸入同步時鐘。系統設定主機定時在第5 個時間段時開始發送數據,從機每收到一個字節數據就產生一次SPI 中斷,在中斷程序中將數據取走放到相應的存儲單元。
2.4 單片機給GSM 模塊發送AT 指令程序設計
單片機通過GSM-AT 指令控制GSM 模塊發送短消息。指令執行過程需要單片機與GSM 模塊完成交互應答,每次發送或接收的字節數都有嚴格規定,二者必須依據規定實現數據交換。本段子程序主要實現的功能是系統上電、完成初始化后,將數據形成短信發送到GSM 網。程序的流程圖如圖8所示。
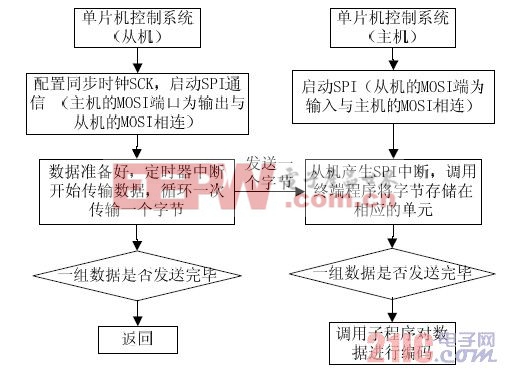
圖7 SPI 串行通信流程圖








評論