基于MCU的智能定位報警拐杖研究

1. 1.4 單片機控制電路
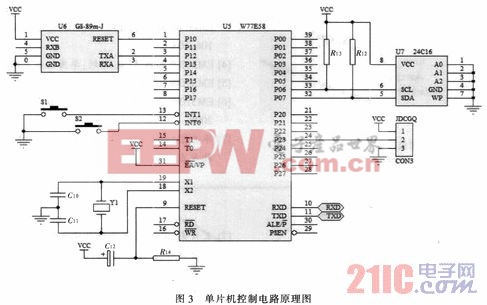
單片機控制電路組織和控制GS-89m-J定位模塊、角度傳感器、EM310傳輸模塊進行有序協調的工作。單片機選用W77E58,可以提供兩個串口,分別與GS-89m-J定位模塊、EM310傳輸模塊通信。在預置活動路線時,單片機記錄路線上各點的GPS信息并存儲在系統中,以用于判定實際活動路線是否超出該范圍。原理圖如圖3所示。
1.2 監控終端
監控終端可以使用普通手機,也可以使用PDA、微機。
用普通手機和PDA時,需要接入CMWAP、CMNET、CMCARD等無線上網服務,主要實現與智能拐杖終端的語音通信、定位信息收發等功能。
使用微機可以實現實時定位,顯示活動軌跡等,軟件上結合數據庫技術、地理信息技術、網絡協議技術等,硬件上需要接入Internet,寬帶網絡或者ADSL均可,但是要求有網絡服務供應商提供的公網IP地址,如果是局域網用戶,需要設置端口映射。IP地址動態或靜態均可,但是動態IP需要申請動態域名解析服務。
2 系統軟件功能
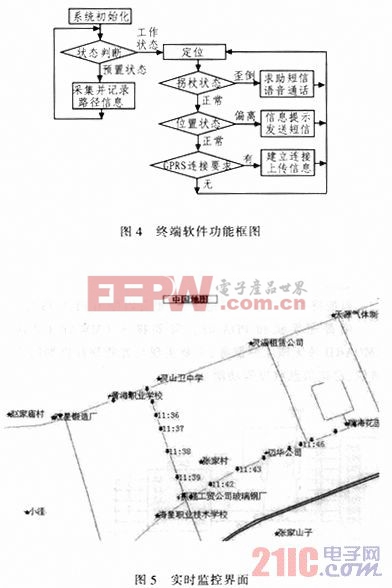
智能拐杖終端軟件主要完成初始化設置、路徑預置、定位、拐杖狀態判定、提示和求助、建立GPRS連接等功能。智能拐杖終端軟件功能框圖如圖4所示。微機端軟件主要設置Internet連接參數、MAPX地圖顯示等功能。微機實時監控界面如圖5所示。











評論