基于單片機和Modbus協議的停車器控制系統

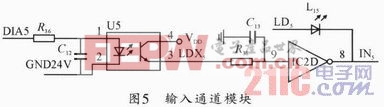
通過輸入模塊,位置傳感器將轉轍機的行程信號輸入到控制單片機中。先經過濾波以減小干擾,然后經過光電隔離以保護主控電路,最后通過輸入到單片機端口上,通過發光二極管顯示輸入的電平高低情況,如圖5所示。本文引用地址:http://www.j9360.com/article/171030.htm
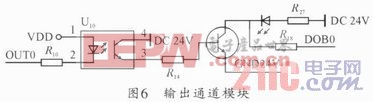
現場主控制模塊單片機輸出的TTL邏輯電平通過光電隔離后,經過三極管放大的輸出,經過接24 V電源的上拉電阻和顯示用的發光二極管,輸出電壓以控制繼電器,選擇正反兩個連線方案,進而實現對轉轍機電動機的控制,實現前進、后退和停止,如圖6所示。
3 軟件設計
(1)主機程序
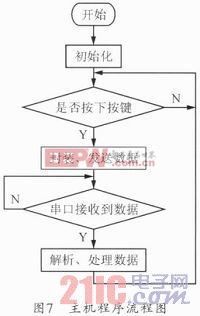
主機程序流程圖如圖7所示。系統的初始化包括打開串口和設置串口。程序先檢測是否有按鍵按下,如果有按鍵按下,則根據按鍵封裝相應的數據并發送,否則繼續檢測是否有按鍵按下。然后檢測串口是否收到來自從機的數據,如果有收到數據,則解析該數據并做相關處理,顯示出來,然后繼續檢測是否有按鍵按下,否則繼續檢測串口是否有收到數據。











評論