用于衛星地面移動通信系統的相控陣天線

在硬件電路的基礎上,還需配以相應的軟件程序。其主要功能一方面是提取GPS的定位數據;另一方面就是對數據進行處理計算,求出移動用戶坐標系中移動用戶所處位置相對于通信衛星的方位角A、仰角E。結合搭載在車載用戶上的GPS速度方位角,算出移動用戶天線波束指向通信衛星信號的方位角φ、仰角θ。根據φ、 θ計算得到每個移相器的波束控制碼。
完整的相控陣天線系統由輻射單元陣列、移相器、功分網絡、波束控制器以及電源等輔助設備組成。
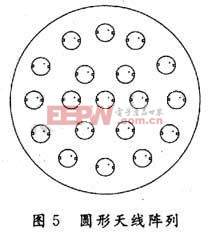
天線陣列 天線陣面由19個單元組成,單元基本尺寸為:D=63 mm,△S/S=2.5%。陣元間距100 mm,按照圓形陣分三圈分布,由內到外單元數依次為1-6-12,半徑240 mm,介質層厚度h=6 mm,相對介電常數為2.65,單元饋電點通過過孔與背板上的SMA相連。天線陣形式如圖5所示。
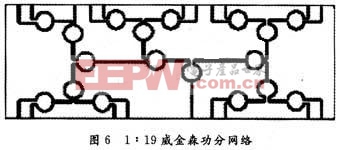
移相器與功分網絡 選用微帶二極管型式的3 b可控數字移相器。其特性參數插損約為1 dB,駐波比小于1.25,質量40 g,功耗0.6 W,滿足在相控陣天線中對數字移相器體積小、功率低、轉換時間短、穩定性好的要求。功分網絡采用威金森功分器,以1:19進行設計,實測帶內插損約1 dB,端口隔離度>20 dB。結構如圖6所示。
波束控制器 GPS模塊選用GARMIN的15LOEM板,它并行12通道,可同時跟蹤12顆衛星,定位精度高,功耗低。DGPS可實時WAAS差分或偽距差分,差分精度3~5 m。電子羅盤采用Honeywell的3300磁感應芯片的OEM電子羅盤模塊。它可提供數字航向,直接輸出數字信號,通過RS 232可與單片機通信。它的傾斜角可達±10°,在此范圍內,可以提供較精確的三維角度,航向精度為1°。它的數據更新率可以達到10 Hz,用戶可以自由配置和存儲參數。
單片機選用SILION公司C8051F020,能夠滿足以上系統的要求。C8051F020單片機采用SILICON公司的專利CIP-51微處理器內核。該芯片在程序運行時可實現內、外部時鐘的切換,這在低功耗應用系統中非常實用,同時C8051F020還在內部增加了復位源,從而大大提高了系統的可靠性。
輔助設備 系統輔助設備包括給系統供電的直流電源,連接電纜以及射頻接口等。
3 設計與實驗結果
按照設計方案研制了樣機,掃描范圍:仰角30°~90°,方位角0°~360°。系統功分網絡輸出口處電壓駐波比如圖7所示。
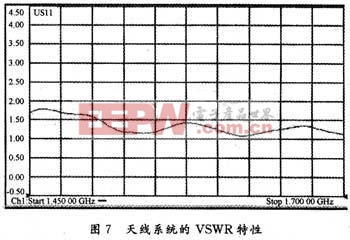
表1~表3列出了相控陣天線的部分掃描特性。

4 結語
本文給出了一種應用于衛星地面移動通信終端的相控陣天線的設計,采用GPS結合電子羅盤的方案采集運動載體的相差信息,通過波控機控制天線波束自動跟蹤通信衛星,對天線單元和波束控制系統進行了分析和設計。實測結果與理論設計吻合較好,從而為衛星移動通信系統實現“動中通”提供了一種新的方案。
功分器相關文章:功分器原理 電機保護器相關文章:電機保護器原理








評論