固定翼飛機豎直飛行控制系統方案設計

·傳感器MMA7260QT輸出的三個軸的數據分別送入主控MCU的三個A/D輸入端ADP0、ADP1和ADP2,電源接一個電阻和電感可防止電源對傳感器的干擾。本文引用地址:http://www.j9360.com/article/161120.htm
·整個電路的電源由J1從接收機引入,通過78FC33變為3.3V后給MCU和傳感器供電,J2、J3、J4分別是左右、油門和前后控制。
·主控MCU的第二路TPM的捕捉輸入端TPMCH1接接收機的信號輸出端。本遙控系統是9通道的,也就是可同時控制9個機構,這種9通道的信號見圖3。它是由間隔為20ms的一個個脈沖串組成,每個脈沖串有9個脈沖,連續兩個脈沖的上升沿的間隔就是遙控器送出的有效控制信號,此間隔最小1ms、最大2ms。TPM捕捉到9個脈沖的寬度后,就可以根據需要直接送給舵機或經PID運算后再送給舵機了。至于如何識別某一脈沖是上一個脈沖串的結尾還是下一個脈沖串的開頭,這里涉及到一個同步脈沖的概念,屬于軟件內容,在此先不作解釋。

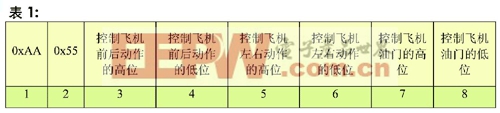
·主控MCU的串行輸出端接輔助MCU的串行輸入端。主控MCU想如何控制飛機動作,只要通過串口把數據發送給輔助MCU就可以了,發送格式如表1所示,共8個字符,其中0xAA、0x55為引導位……
·三個LED,D1是電源指示燈,D3用于指示“我是控制電路,我已經開始控制飛機豎直飛行了”,D2是“出錯了,小心出問題,快切換回由你控制吧。”
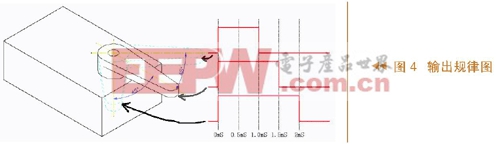
·輔助MCU有兩個工作:一是讀主控MCU送來的串行數據,找到引導字符后,把前后左右上下(油門)的數據送入相應的數組貯存;二是每20ms把相應的數組里的數據以脈沖形式發送出去。脈沖最小1ms、最大2ms。這個信號送入飛機的執行機構——舵機后對應的輸出規律見圖4。1ms的脈沖使舵機搖臂在最左邊的位置,1.5ms的脈沖使舵機搖臂位于中位,2ms的脈沖使舵機搖臂在最右邊的位置。舵機的搖臂連接飛機的各執行機構,搖臂搖動時飛機的執行機構(如尾翼等)也跟著擺動。
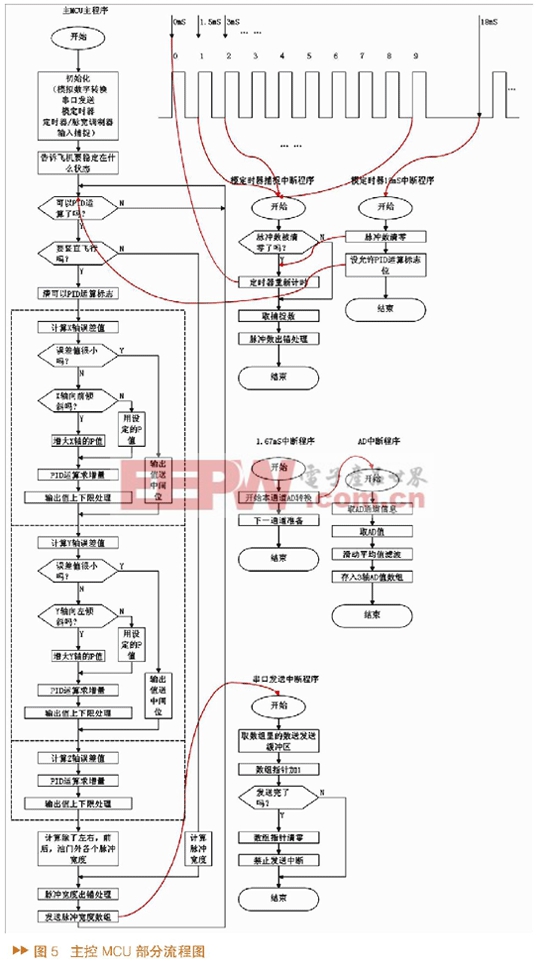
軟件描述
主控MCU部分,流程圖見圖5。









評論