基于PCI總線的MPC07控制卡的運動控制系統方案設計

程序執行時,首先對控制卡進行自動檢測和初始化,在程序界面中可以設置的參數包括:小車初始位置、初速度、最高速度、加速度、移動距離等,參數設置不滿足要求時,還需要重新設置,只有滿足要求后,才能開始運行程序。運動過程中可進行人工干預,人工干預后小車可立即制動也可光滑制動,如不需要干預,小車按照設置運動到指定位置。
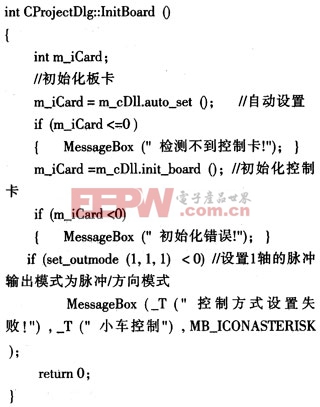
(1)初始化控制卡
首先定義DLL運動控制函數庫變量:CLoadDll m_cDll,初始化函數為InitBoard (),其執行代碼如下:
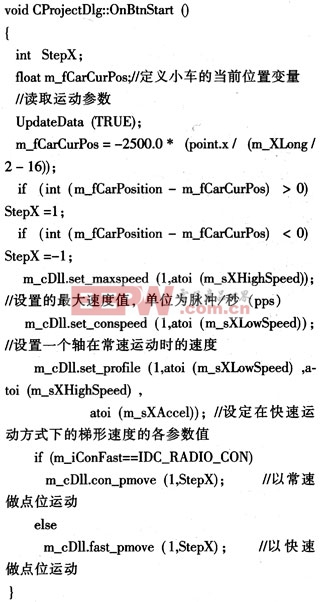
(2)運動實現
運動小車在點位運動方式下可進行常速或快速運動,軟件通過對設定的移動距離與小車當前位置的比較來確定小車的運動方向,而后系統根據用戶設定的運動參數進行相應的運動,其部分實現代碼如下:
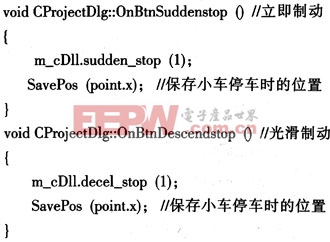
(3)制動
小車在運動過程中可采取立即制動和光滑制動兩種制動方式,代碼如下:
此外,程序運行時為了提高程序控制的精度,必須補償實時顯示用取得cpu的時間,也就是程序中的誤差補償部分。通過編譯程序顯示小車的運動控制界面如圖3所示。

3 結束語
本文以基于PCI總線的MPC07控制卡為開發平臺,利用VC++結合MPC07控制卡的運動控制函數庫編寫了面向對象的系統控制程序,通過MPC07卡對步進電機進行精確運動控制,從而實現了運動系統中小車的精確調速和定位,解決了運動控制系統中控制精度低的問題。應用結果表明,MPC07控制卡具有開發簡單、運動可靠和控制方便等特點,能出色的完成運動控制的各個細節。本文引用地址:http://www.j9360.com/article/161103.htm

伺服電機相關文章:伺服電機工作原理










評論