汽車側向傾斜角度傳感器的應用

角度傳感器在控制系統中通常作為采樣元件,其性能的優劣對整個系統起著重要作用。電位器式角度傳感器已在各種控制系統中廣泛應用, 但它的缺點是存在觸點的滑動磨損和電噪聲; 磁敏電阻式角度傳感器是利用半導體技術制造的新型純電阻性元件, 特點是無觸點, 當擺動部分偏轉時, 通過磁敏電阻的磁通量發生變化, 使磁敏電阻的阻值發生數倍以上的變化, 從根本上消除了電噪聲, 并使精度得以提高。
各種角度傳感器都具有阻尼功能, 使得對所測得角度的響應有一個短暫的延時———對控制系統來講是有益處的。
3 角度傳感器電路
圖2 是側向傾斜角度傳感器的一種實用電路,主要由單電源運算放大器(如LM324) 組成, 其作用是將角度傳感器中的電位器W1 輸出的線性變化的模擬電量進行處理、放大, 能夠按規定輸出數字量和模擬量。令水平時電位器W1 滑動點Ui 的電位為(1P2) Ec ( Ec 為穩壓電源電壓, 通常為9 V 或15 V ,下同) , R1 、R2 、R3 、R4 為附加電阻, 并使R1 = R2 ,R3 = R4 , W2 為調中電位器, 阻值很小。調整W2 ,當W1 處于水平狀態時, 使運放A1 、A2 輸出端電位為(1P2) Ec 。運放A1 組成反相比例運算放大器, 作為電路的前置級放大, 輸入電壓為Ui , 輸出電壓U1 =- ( R7PR5 ) Ui , 且應使R6 = R5 ∥R7 ; 運放A2 組成反相器, 電阻R10 = R8 , 且應使R9 = R8 ∥R10 ; 輸出電壓U2 = - U1 = ( R7PR5 ) Ui 。A1 和A2 的輸出端分別由發光二極管LED1 、LED2 組成或門電路輸出,使得汽車不論是左傾還是右傾, 輸出端Uo1均能輸出與輸入量Ui (隨傾斜角度變化) 成正比例線性關系的模擬信號, 即Uo1 = ( R7PR5 ) | Ui | , 去控制后面的電路或機構。發光二極管還能指示傾斜方向, 當水平狀態時, 模擬量輸出端Uo1 = (1P2) Ec 。
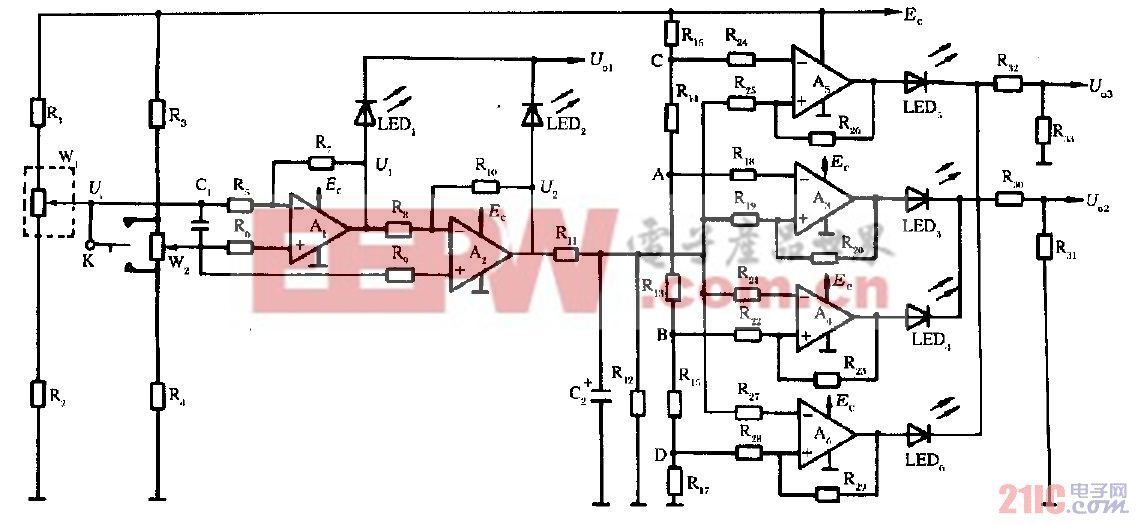
運放A3 、A4 和A5 、A6 分別組成窗口比較器,電阻R20 、R23 、R26 、R29是阻值較大的正反饋電阻,以改善運放的開關狀態工作性能, 電阻R13 ~R17 為分壓電阻, 且應R14 = R15 , R16 = R17 , 電阻R13 中點處的電位為(1P2) Ec , 分壓電阻的阻值應根據U2的變化所反應的傾翻力決定, 使得運放A3 和A5 的反相輸入端、運放A4 和A6 的同相輸入端獲得不同的開關轉換基準電位, 而且所反應的左右傾斜程度是一致的。水平時, U2 = (1P2) Ec , 運放A3 ~A6均輸出低電平; 傾斜時, U2 的電位發生變化, 運放A3~A6 按規定要求輸出高電平。例如, 電位器W1 左擺時, 使U2 電位升高, 當高于A 點電位時,運放A3 輸出高電平, 二極管L ED3 顯示傾斜方向,若汽車繼續向左傾斜, 使U2 電位繼續升高, 當高于C 點電位時, 運放A5 輸出高電平, 二極管L ED5顯示傾斜方向且程度加重; 同理, 若電位器W1 右擺, 運放A4 和A6 的工作亦如此。2 個輸出端Uo2和Uo3輸出的數字信號所反映傾斜程度與傾斜方向無關, 很明顯, Uo3有高電平信號輸出時, Uo2 已經輸出高電平, Uo3所反映的傾斜程度大于Uo2 。
K為自動復中位型扭子開關, 作為電路的檢驗開關, 當上下搬動時, 應分別使二極管L ED2 、L ED3 、L ED5 和L ED1 、L ED4 、L ED6 發亮。電容器C1 為高頻旁路電容器, C2 為低頻濾波電容器, 并與電阻R12 組成放電回路, 形成延時環節, 在系統中相當于傳感器中的阻尼作用增加。
4 應用
根據前文對圖2 電路的敘述可知, 汽車側向傾斜角度傳感器的應用有2 種形式。一是由電路發出的數字信號Uo2 , 驅動聲光信號裝置, 提醒駕駛員減速; 二是由電路發出的數字信號Uo3 或模擬信號Uo1控制執行機構, 使汽車自動減速, 采用數字信號組成定量減速系統, 減速時略有些速度忽變, 采用模擬信號組成比例減速系統, 減速的效果比較平滑, 實現減速的方法有2 種, 一是減小發動機油門開度, 二是增加制動。下文分述。
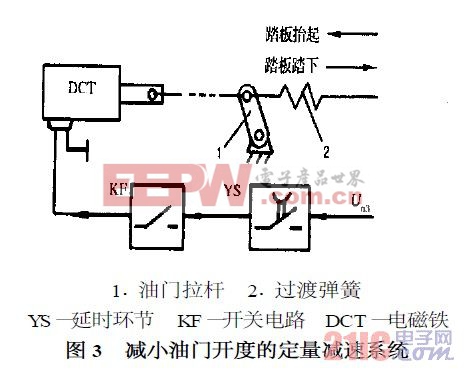
4.1.1 減小油門開度的定量減速系統由傳感器電路發出的數字信號, 控制執行元件(如電磁鐵) 組成減小發動機油門開度的定量減速系統, 如圖3 所示。汽車正常行駛時, 油門拉桿由油門踏板控制, 電磁鐵中的動鐵心隨油門拉桿同步移動; 當汽車側向傾斜(指速度、轉彎半徑及路面坡度的綜合值, 下同) 超過設定值時, 傳感器電路輸出端Uo3發出信號, 經延時環節YS (如時間繼電器, Uo3消失后, YS 延時斷開, 若阻尼和電路的延時足夠, 可以不設) , 開關量放大環節KF (如繼電器) , 使電磁鐵DCT 得電工作, 動鐵心迅速移動至終止位置, 帶動油門拉桿, 使油門開度突然減小。
在這一系統中, 動鐵心移動的起始位置不是固定的, 終止位置是可以預先設定的, 所獲得的減速程度有所不同。因此, 應根據不同的車型, 合理地設定發動機減速所要達到的轉速, 使減速不至于過于突然。
4.1.2 減小油門開度的比例減速系統為了避免上述系統中減速的突變性,應采用比例減速系統, 如圖4 所示。在比例減速系統中, 由傳感器電路Uo1 端輸出模擬電壓信號, 控制電流放大板DF , 按照輸入信號Uo1的大小, 輸出不同的電流值, 使比例電磁鐵產生不同的位移, 油門開度的減小與Uo1的增大成正比關系, 減速所達到的最終結果是傾斜程度所決定的。
再看一下減速的過程: 電流放大板輸出電流的存在或消失要經上升斜坡延時t u 和下降斜坡延時t d 。上升斜坡延時是指輸出電流(平均值) 從0 達到某一穩定值(由Uo1 決定) 所需要的時間。下降斜坡延時是指控制信號Uo1 消失, 輸出電流從這一穩定值減小至0 的時間, 詳見圖5 。在電流放大板上, 上升斜坡延時和下降斜坡延時可以分別調整,減速的平穩性由上升斜坡延時所決定, 上升斜坡延時越長, 輸出電流的上升速率越小, 比例電磁鐵移動到終止位置(由輸出電流決定) 所用的時間就越長, 減速效果越平穩; 異而反之。比例電磁鐵移動到某一終止位置后, 即完成減速的平穩過渡, 持續一段時間后, 傾翻力矩小于設定值或消失, 使Uo1減小或消失。若使Uo1減小, 則輸出電流按t d 所決定的斜率下降, 直至為0 。假設Uo1 突然消失, 輸出電流則經過t d 延時后為0 , 從而, 實現了減速后重新加速的平穩性。對于上升斜坡延時和下降斜坡延時, 亦應根據不同車型和系統參數決定。
電流放大板輸出電流的大小通常采用脈寬調制(簡稱PMW) 技術獲得, 由輸入信號Uo1 決定輸出電流波形的占空比, 改變電流的平均值, 這種直流電流中含有一定成份的顫振分量,可克服比例電磁鐵的調節滯環, 提高位置控制精度。
4.1.3 減小油門開度減速系統與原車油門機構的連接由圖3 和圖4 可知, 減速系統的執行元件所產生的位移與原車油門踏板所產生的位移的方向是相反的, 當執行元件使油門開度減小時, 勢必會使油門踏板抬起, 并要克服原車油門機構的阻力, 若駕駛員的腳踏在踏板上, 執行元件需產生較大的力量才能完成動作, 同時, 對傳動機構中機械零件的強度、剛度也要提高要求, 使得減速系統不夠完善。













評論