基于MEMS 和MR 傳感器的嵌入式系統姿態測量

3. 姿態參數的獲得
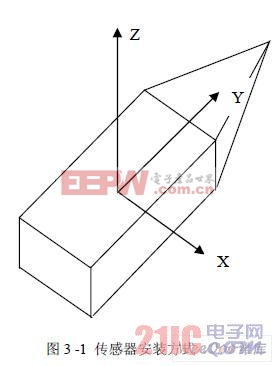
在本系統中,三軸加速度計和三軸 MR 傳感器都以以下的方式安裝于電路板上:它們 的X 軸平行于系統的橫軸指向右,Y 軸平行于系統的縱軸指向前,X、Y、Z 軸定義為右手 坐標系統,如圖3 -1 所示。
3.1 俯仰角與橫滾角的獲得:
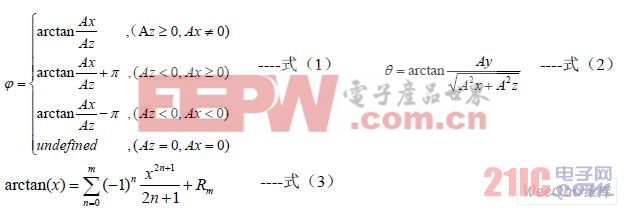
為了獲得系統基于重力向量的俯仰角θ 和橫滾角φ,需要使用加速度計的三個輸出:Ax, Ay, Az 。俯仰角和橫滾角可以通過以下公式(1)和公式(2)計算得到。對于微控制器,函數 中的arctan(x) 需要通過以下公式(3)的泰勒展開后才能計算得到。
3.2 方位角的獲得:
為了獲得系統相對于當地地磁向量的方位角,需要使用MR 傳感器的三個輸出Mx, My, Mz 。當系統置于水平狀態時(俯仰角和橫滾角都為0)時,方位角ψ 可以由公式(4)直 接給出,但是在大多數情況下,系統并不是工作在水平狀態,此時地磁場的豎直分量將會影 響Mx 和My 的值,因此不能直接由公式(4)獲得相對于地磁向量的方位角。為了在所有 情況下都能獲得正確的方位角,必須將俯仰角和橫滾角考慮在內,即必須通過以俯仰角和橫 滾角為參數的坐標變換,將測得的(Mx, My, Mz)向量變換為與載體坐標系有相同方位角的 水平坐標系下的向量(M’x , M’y, M’z),其變換矩陣如公式(5)。

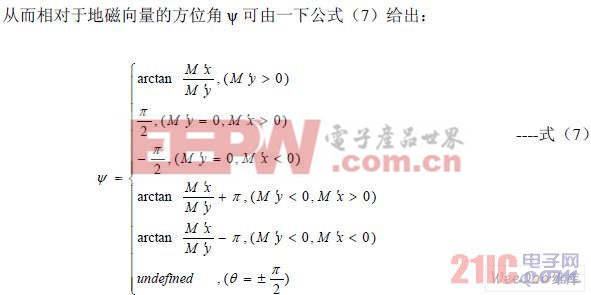
至此,系統的3 個姿態參數全部由公式(1)(2)(7)給出。
4. 誤差分析:
本文論述的姿態測量系統主要由 MEMS 加速度計和MR 傳感器組成。由于現有MRMS 技術的限制,其精度和傳統的加速度計還有一定的差距,這將給所得到的俯仰角和橫滾角帶 來更大的誤差。MR 傳感器是對磁場敏感的器件,當其被放置在鐵磁環境中的時候,地球的 磁場將受到附近鐵磁環境的扭曲,這將導致方位角的誤差。然而這種由于附近鐵磁物質的影 響而引入的誤差是可以補償的。
5. 結論:
使用MEMS加速度計和MR傳感器構成的姿態測量系統有效的降低了整個系統的體積、 成本以及功耗,使得嵌入式系統也可以引入姿態測量的功能。本文論述的姿態測量系統非常 適用于汽車導航,機器人姿態測量等領域。本文的創新點在于使用MEMS 和MR 元件構造 了應用于嵌入式系統中的姿態測量系統,并詳細給出了各姿態參數的計算方法。

接地電阻相關文章:接地電阻測試方法
linux操作系統文章專題:linux操作系統詳解(linux不再難懂)






評論