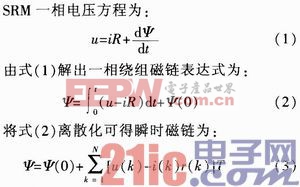
雙SRM無位置控制系統在采煤機中的應用

摘要:針對采煤機惡劣的工作環境導致位置傳感器故障率高,系統可靠性差的問題,提出了雙開關磁阻電機(SRM)無位置傳感器控制策略。以DSP為核心控制芯片,搭建了雙18.5 kW SRM控制器,并在某型電牽引采煤機上進行了實驗驗證。實驗結果表明,主、從機換相平穩,輸出功率平衡,位置估計精確,轉矩脈動小。
關鍵詞:開關磁阻電機;無位置傳感器;控制
1 引言
采煤機是煤礦井下主要的生產設備,不僅需要較大的牽引力,而且需要頻繁的啟動和換相,工作環境十分惡劣,因此要求調速系統具有防爆、防潮以及防塵等要求。
采煤機牽引主要有液壓牽引和電牽引兩種方式。前者故障率高,維修費用大;后者有運行可靠,系統反應快,效率高,可四象限運行,維修簡單方便等諸多優點,因此得到了廣泛重視。SRM起動轉矩大,機械特性較硬,適合頻繁起停,具有堅固可靠,易于水冷等優點,因此較其他電機更適合作為采煤機的牽引。
位置傳感器的應用不僅增加了系統成本和復雜程度,更重要的是降低了系統結構的堅固性,影響運行可靠性,尤其是在潮濕、振動、多塵等環境較惡劣的場合。國內外學者提出了多種可行的無傳感器控制方案,如電壓脈沖注入法、磁鏈電流法、電感模型法和神經網絡法等。在此采用了簡化的磁鏈電流法,首先以高性能DSP實現數字磁鏈積分器獲得估算磁鏈,然后與當前換向位置磁鏈比較,確定是否到達換相位置。
2 雙SRM無位置傳感器控制系統
2.1 采煤機電牽引系統
采煤機的任務是同時完成落煤、裝煤兩道工序。雙滾筒采煤機是目前應用最廣的采煤機械,主要由截割部(包括截割電機、搖臂和截割滾筒)、牽引部和中間箱組成。左右截割部的電機動力經齒輪減速傳遞到搖臂進而最終驅動左右滾筒實現割煤,搖臂用于調整滾筒的截割高度;左右牽引部的作用是使采煤機沿工作面移動,實現連續割煤;中間箱主要包含采煤機的電氣控制部分。此處研究的兩臺SRM分別安裝在采煤機左右牽引部中,采用防爆水冷方式。
2.2 SRM無位置傳感器控制策略
2.2.1 SRM的磁鏈特性
SRM的雙凸極結構使得其通常工作在磁飽和狀態,因此難以建立可以求解的精確數學模型。SRM的磁鏈特性可以通過有限元分析或實驗測量的方法獲得,其表現形式為電動機磁鏈、相電流和轉子位置之間的曲線族。三相12/8極結構的SRM,θ=0°對應于定子凸極中心與轉子凹槽中心重合的位置,此處相電感最小;θ=25°對應于定、轉子凸極中心完全對齊的位置,此處相電感最大。圖1a為磁鏈特性的二維曲線,圖1b為磁鏈特性的三維曲線。


















評論