ADS環境下基于S3C24 1 0串口應用程序的開發

1 硬件結構
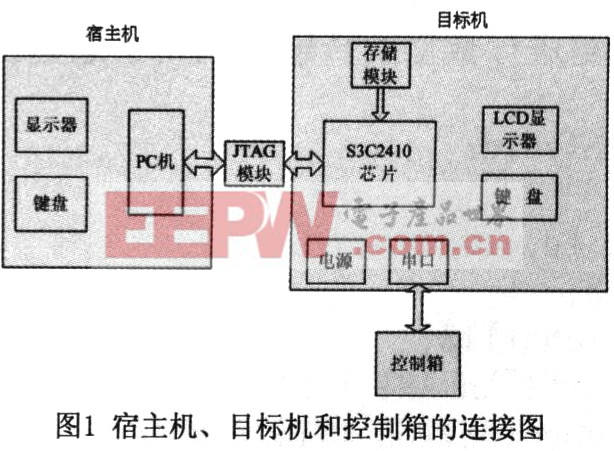
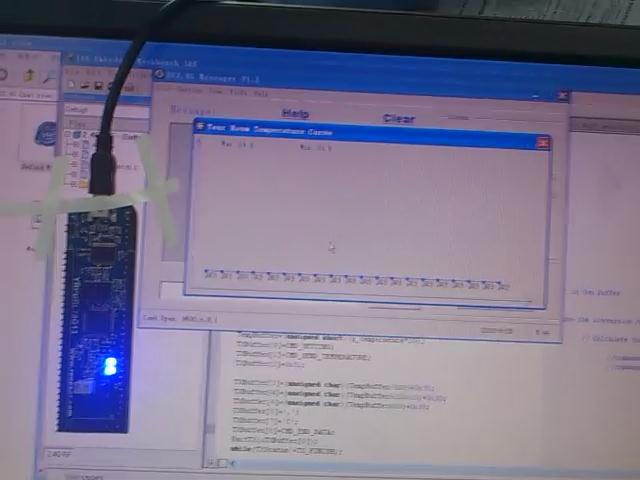
目前串口大部分是在Windows或是在Dos下運用,本文是在Linux系統下利用串口來實現通信的。S3C2410芯片是三星公司生產的16/32bit的RISC處理器,獨立的16kB指令和16 kB數據的緩存(cache),用于虛擬內存管理的MMU單元,LCD控制器(STNTFT),非線性(NAND)FLASH的引導單元,系統管理器(包括片選邏輯控制和SDRAM控制器),3個通道的異步串口(UART),每個控制器支持的最高波特率可以達到230400 Boud/s,這些特點為實現在Linux系統下計算機與開發板之間順利進行串口通信提供了可靠的保證。WNSC400是北京維納光科公司生產的電動位移平臺控制箱,它擁有RS232的串口能使S3C2410通過串口對其進行數據通信,從而能夠實現S3C2410對電動位移平臺的控制。但是控制箱是在Windows環境下實現的,所以要想把它應用到嵌入式系統中是存在難度的。S3C2410的串口要實現與控制箱的數據傳輸,那么就要使控制箱及其控制的電動平移臺實現與其它模塊組成嵌入式系統,比如與一臺攝像頭聯系起來,當攝像頭對物體進行圖像采集后,對采集數據進行處理,進而計算出目標具體要改變的位移等參量,然后控制箱在通過$3C24lO的存儲器中讀取這些數據,并發出命令使電動位移平臺按需要的改變量進行移動,這樣就是實現了一個簡單的嵌入式系統。計算機(宿主機)、目標機(S3C2410)還有控制箱之間連接的硬件原理如圖1所示。在宿主機上將在ADS環境下編好的程序通過JTAG下載到S3C2410后,S3C2410就可以通過串口與控制箱進行通信。本文引用地址:http://www.j9360.com/article/152310.htm
2 UART軟件部分的實現
絕大多數的Linux軟件開發都是以native方式進行的,即本機(HOST)開發、調試、本機運行的方式,但是由于在目標機上沒有足夠的資源來滿足嵌入式系統的開發,所以這種方式不適合于嵌入式系統的軟件開發。通常嵌入式系統軟件開發采用交叉編譯調試的方法。交叉編譯的主要特征是某機器中執行的程序代碼不是由本機編譯生成,而是由另外一臺機器編譯生成。
串口通信的基本任務有:實現數據格式化、進行串/并轉換、控制數據傳輸速率、進行錯誤檢測和進行TTl與EIA電平轉換。串口通信分為同步通信和異步通信兩種類型,本文將用到異步串行I/0。
由于Linux系統將所有的設備都看成文件,所以訪問串口時,認為串口是一個文件,我們可以使用文件系統控制函數實現基本的串口操作,比如open()函數用來打開串口,read()和write()函數用來讀寫串口,在傳輸數據完成后可以用close()函數關閉串口。











評論