半導體培養箱的ARM嵌入式控制系統研制


2.3 系統應用層的程序設計
應用層的程序設計主要是在Qt/Embedded平臺上完成的,負責設計觸摸屏的應用程序GUI,另外通過調用驅動程序以實現硬件平臺的工作算法。Qt/Embedded是由Trolltech公司開發的面向嵌入式的Qt版本。它通過Qt API與Linux I/O以及Framebuffer直接交互,擁有較高的運行效率,其類庫采用C++封裝且完全面向對象以實現真正組件編程。其開發套件使用C++語言編程,具有功能強大、使用簡單、控件資源豐富且可移植性好等特點[7]。
本系統主程序的觸發來自兩方面。其一是按照系統時鐘,依據時序觸發各事件并完成相應的處理;另一方面由用戶界面操作觸發。根據設計要求,系統主程序采用雙線程工作方式,分別定義Ctrb_n 與SensorT繼承QThread實現雙線程。 QThread代表在程序中一個單獨的線程控制[4],在多任務操作系統中,它和同一進程中的其他線程共享數據,但運行起來就像一個單獨的程序一樣。QThread不是在main()中開始,而是在run ()中開始運行的。
在工作算法中添加模糊PID自適應控制,使控制器能夠在線自動調整比例系數Kp、積分系數Ki和微分系數Kd,以期獲得最佳的溫度控制。在PID控制器中,比例系數Kp值的選取決定于系統的響應速度,積分控制Ki用于消除系統的穩態誤差,微分系數Kd在于改變系統的動態特性。調節初期選取較大的Kp值以提高響應速度,較小的Ki值以防止積分飽和,Kd=0以保證系統的穩定性;在調節中期,隨著誤差的減小Kp也逐漸變小,Ki值加大以盡量消除余差,Kd值取較小值以調節系統的動態特性;在調節過程后期,Kp值調到較小值以保證系統的平穩性,Ki值取適中以消除余差,Kd值取小值以控制過程的制動作用[5]。主程序的工作流程如圖5所示。

3 結果分析
在室溫為33℃時,設定目標溫度為48℃,分別采用普通PID算法與模糊自適應PID算法測得實驗數據,并利用MATLAB對所測實驗數據進行比較分析,得到圖6所示的溫度變化曲線。
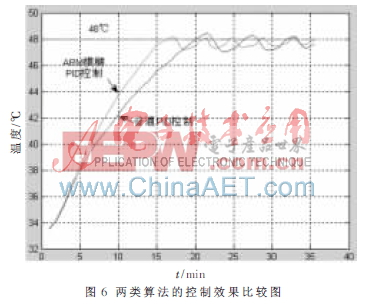
從圖6可知采用普通PID控制時,具有調節速度慢、超調量大以及精度不高等特點;而ARM實現的模糊PID控制,其調節時間相對于普通PID控制而言減小了5 min, 超調量變小, 平穩性更好,且控制相對誤差達到±1.1%。熱電半導體的應用,相對于傳統的加熱制冷設備,在減小噪音和環境污染等方面有很大的改進,從而提高了控制質量,降低了能耗。
本文實現了一種基于ARM9與嵌入式Linux操作系統并采用新型熱電半導體為溫控元件的控制方案,經反復實驗調試該培養箱已達到相對誤差±1.1%的控制要求,所設計的控制方案具有溫度調節響應快、超調量小、性能穩定等特點。該方案具有低功耗、無污染及觸屏控制等優點,具有良好的市場潛力。
參考文獻
[1] 張曉林.嵌入式系統應用[M]. 北京: 高等教育出版社,2008.
[2] 崔光照,陳富強. 基于ARM9的無線傳感器網絡網關節點設計[J]. 電子技術應用,2008, 34(11):115-118.
[3] 艾紅,王洪濤. 基于ARM的嵌入式遠程監控系統[J].電子技術應用,2008,34(9):66-69.
[4] 周慧玲,王智威,張鳳英,等. 基于ARM7和ZigBee技術的物流機械設備測振系統的設計與實現[J].測控技術, 2010,29(2):33-35.
[5] 諸靜.模糊控制原理與應用[M].北京:機械工業出版社,2005.
[6] 毛德超, 胡希明.Linux內核源碼情景分析[M].杭州: 浙江大學出版社,2001,9.
[7] SLOSS A N,SYMES D,WRIGHT C. ARM嵌入式系統開發—軟件設計與優化[M].沈建華,譯.北京:北京航空航天大學出版社, 2005.
[8] 宋戈, 鶴松.51單片機應用開發范例大全[M].北京: 人民郵電出版社, 2010.
[9] 劉輝. 半導體多級制冷器的設計與性能優化[D] .上海: 同濟大學, 2008.

pid控制器相關文章:pid控制器原理
半導體制冷相關文章:半導體制冷原理




評論